ros2 学习04 工作空间说明及示例
ros2 术语说明:

大家在学习其他的开发语言之前的学习和开发中,应该有接触过某些集成开发环境,比如Visual Studio、Eclipse、Qt Creator等,当我们想要编写程序之前,都会在这些开发环境的工具栏中,点击一个“创建新工程”的选项,此时就产生一个文件夹,后续所有工作产生的文件,都会放置在这个文件夹中,这个文件夹以及里边的内容,就叫做是工程。
工作空间是什么?
类似的,在ROS机器人开发中,我们针对机器人某些功能进行代码开始时,各种编写的代码、参数、脚本等文件,也需要放置在某一个文件夹里进行管理,这个文件夹在ROS系统中就叫做工作空间。
所以工作空间是一个存放项目开发相关文件的文件夹,也是开发过程中存放所有资料的大本营。
ROS系统中一个典型的工作空间结构如图所示,这个dev_ws就是工作空间的根目录,里边会有四个子目录,或者叫做四个子空间。
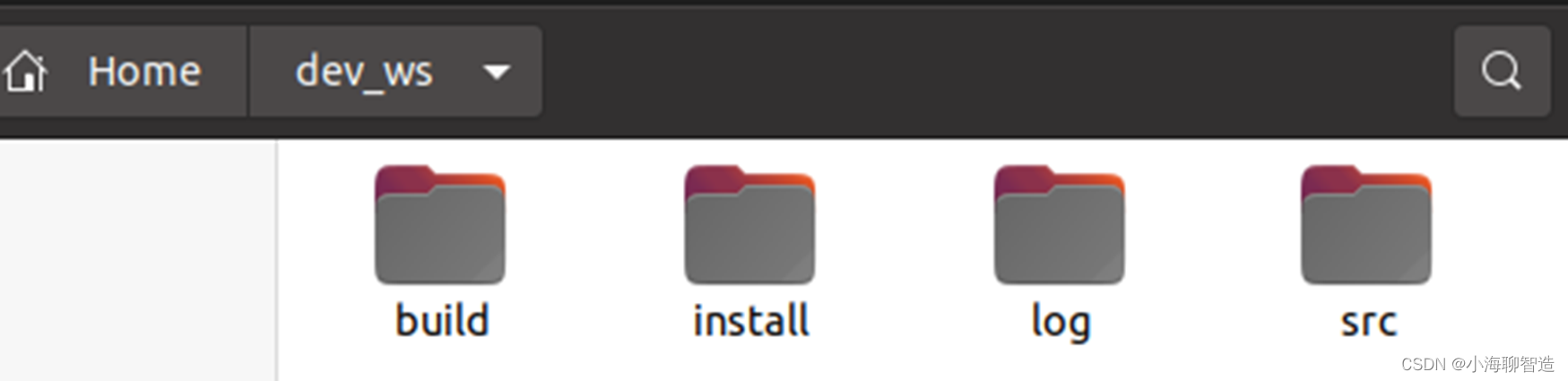
- src,代码空间,未来编写的代码、脚本,都需要人为的放置到这里;
- build,编译空间,保存编译过程中产生的中间文件;
- install,安装空间,放置编译得到的可执行文件和脚本;
- log,日志空间,编译和运行过程中,保存各种警告、错误、信息等日志。
总体来讲,这四个空间的文件夹,我们绝大部分操作都是在src中进行的,编译成功后,就会执行install里边的结果,build和log两个文件夹用的很少。
这里也要强调一点,工作空间的名称我们可以自己定义,数量也并不是唯一的,比如:
-
工作空间1:dev_w_a,用于A机器人的开发;
-
工作空间2:dev_ws_b,用于B机器人的一部分功能;
-
工作空间3:dev_ws_b2,用于开发B机器人另外一些功能。
以上情况是完全允许的,就像是我们在集成开发环境中创建了多个新工程一样,都是并列存在的关系。
创建工作空间
了解了工作空间的概念和结果,接下来我们可以使用如下命令创建一个工作空间,并且下载教程的代码:
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
下载一个网上别人开源的代码
git clone https://gitee.com/guyuehome/ros2_21_tutorials.git
自动安装依赖
我们从社区中下载的各种代码,多少都会有一些依赖,我们可以手动一个一个安装,也可以使用rosdep工具自动安装:
sudo apt install -y python3-pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
cd ..
rosdepc install -i --from-path src --rosdistro humble -y
编译工作空间
依赖安装完成后,就可以使用如下命令编译工作空间啦,如果有缺少的依赖,或者代码有错误,编译过程中会有报错,否则编译过程应该不会出现任何错误:
sudo apt install python3-colcon-ros
cd ~/dev_ws/
colcon是ROS2的编译工具,类似于ROS1中的catkin。运行之后可以看到:
colcon build
编译成功后,就可以在工作空间中看到自动生产的build、log、install文件夹了。
设置环境变量
编译成功后,为了让系统能够找到我们的功能包和可执行文件,还需要设置环境变量:
source install/local_setup.sh # 仅在当前终端生效
echo " source ~/dev_ws/install/local_setup.sh" >> ~/.bashrc # 所有终端均生效
至此,我们就完成了工作空间的创建、编译和配置。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!