PID算法
2023-12-14 14:28:55
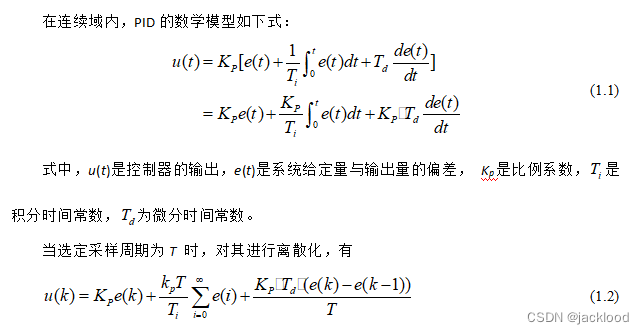
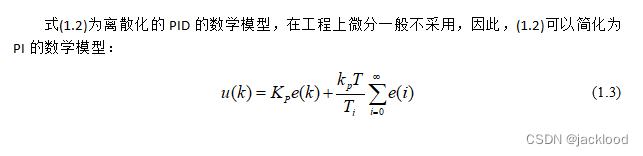
一、PID数学模型
二、PI的两种形式
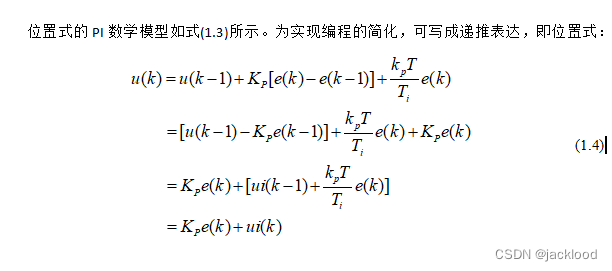
(1)位置式
(2)增量式
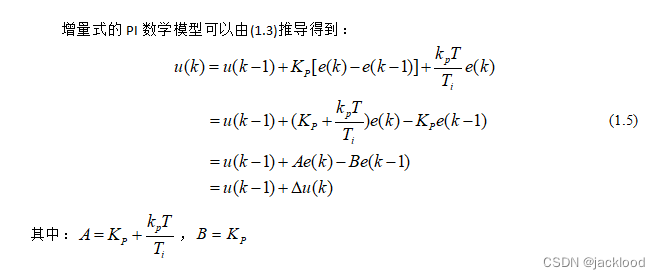
(3)两种模型的差异
通过和的比较可以看出,两种模型在数学上是等价的,位置式的模型表现为比例项和积分项分离的形式,增量式表现为上一拍与差值分离的形式。
三、在工程应用上的注意点

2)积分饱和现象
PI控制系统中,当系统启动或停止,较长时间存在大幅度偏差或者给定量大幅度变化时,积分电容上的电荷持续积累,调节器的输出会达器件的极限(比如放大器的电源电压),这就是积分饱和现象。
?“积分饱和”现象的危害:
可能使PI调节器的控制量超过执行机构由物理和机械性能 所决定的界限,损害系统(必须加限幅)
调节装置的输出信号达到饱和值后,当偏差改变方向时,积分电荷的累积效果使得调节器的输出信号退出饱和需要时间,造成调节器滞后,增加了系统的调整时间和超调量,“积分效应”
因此,必须采用一定的措施来抑制积分饱和现象:
- 积分限幅:对积分项进行限幅;
- 输出限幅:对PI输出的结果进行限幅;
-
位置式:内外限幅算法才可实现要求;
增量式:外限幅算法可实现要求,本身无积分项信息,内限幅不必实现。
文章来源:https://blog.csdn.net/jacklood/article/details/134993895
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!