[AutoSar]状态管理(五)Dcm与BswM、EcuM的复位实现
2023-12-22 23:14:22
??
关键词
嵌入式、C语言、autosar、EcuM、Rte、BswM
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector |
| 芯片厂商 | TI |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |

前言
本文档主要描述了如何实现Dcm实现复位的流程(hardwareReset)
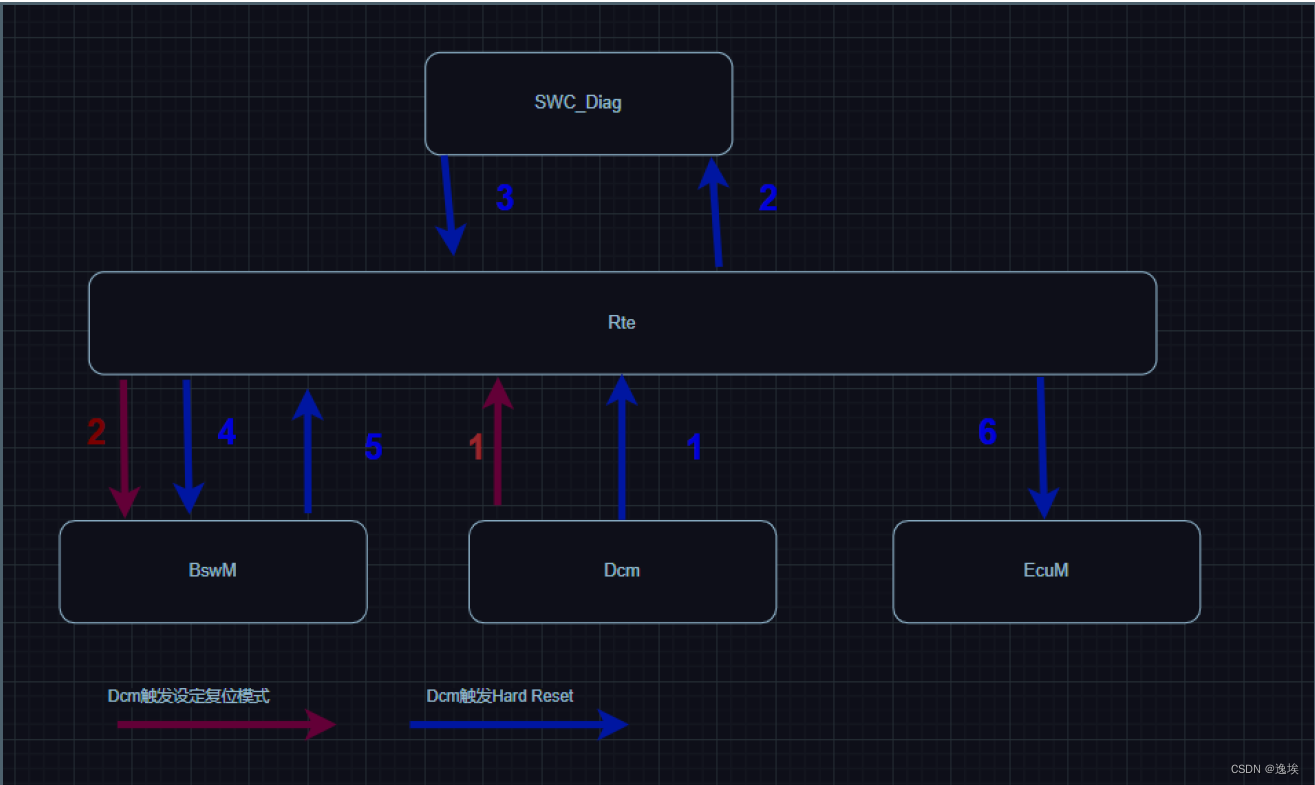
一、总体流程
二、配置
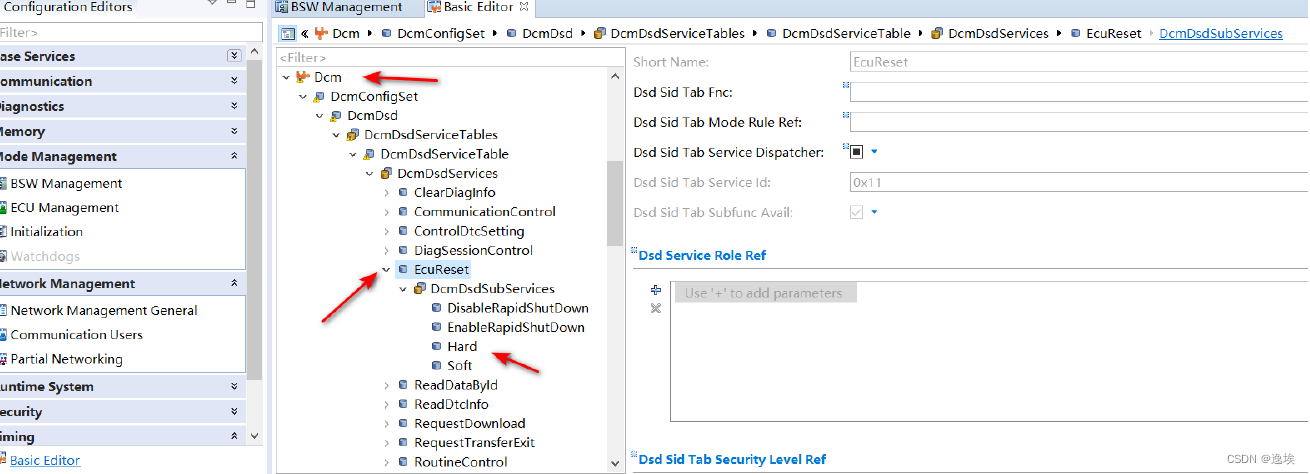
2.1 DCM and DEM
在DcmDsdService中配置好复位服务
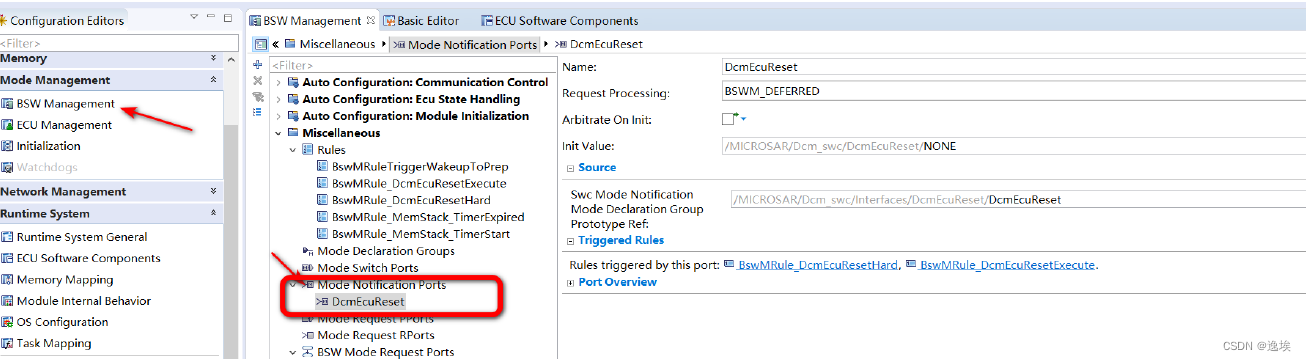
2.2 BSWM
2.2.1 Mode Notifaication Port
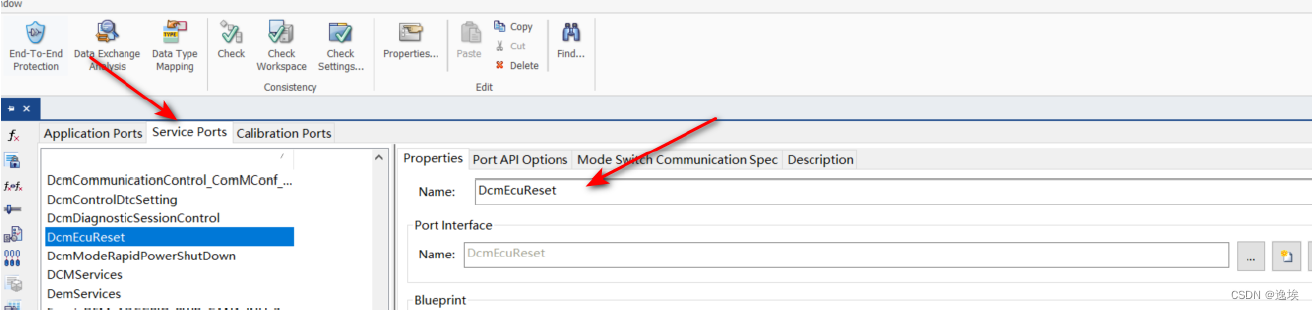
DcmEcuReset是基于Dcm的标准接口,如果没有自动生成请手动创建。
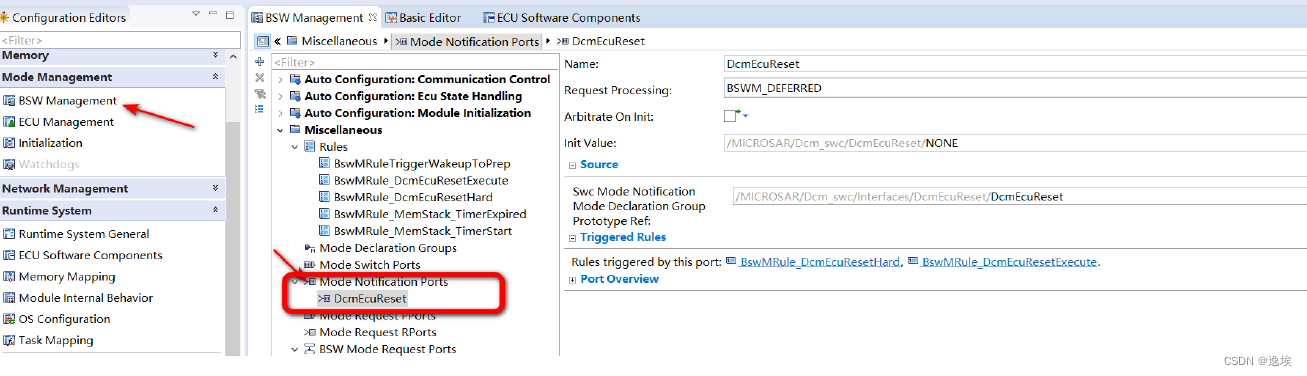
2.2.2 Rules
创建对应的expression、action、actionlist和rules用于当诊断触发时的操作。
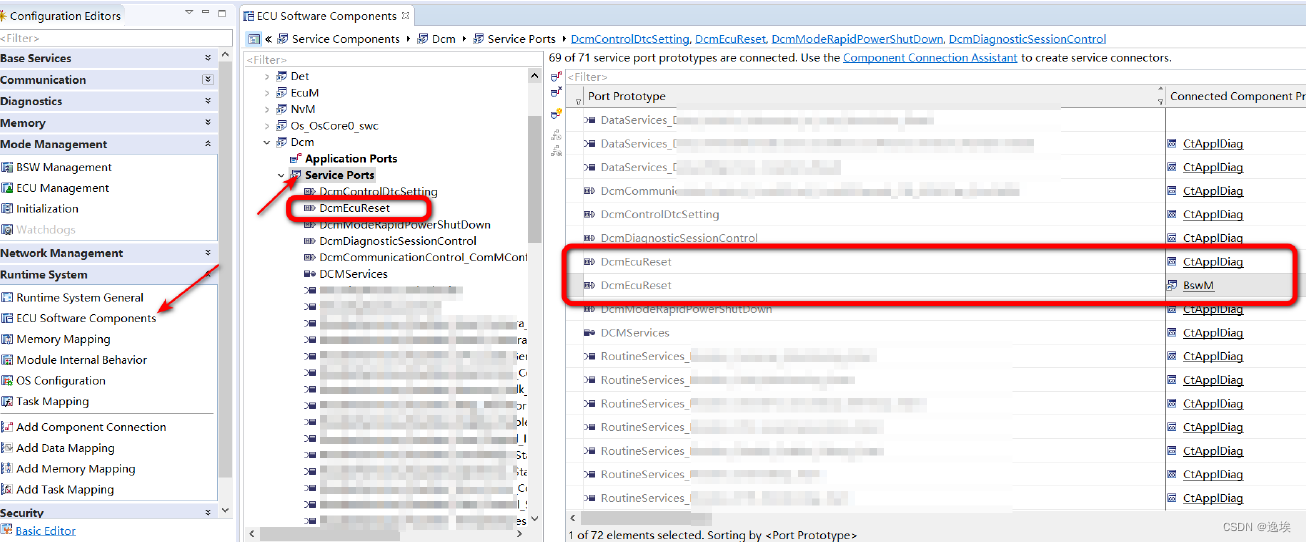
2.3 service port
2.3.1 做好DCM–>BSWM 和DCM -->SWC_Diag 的server port mapping
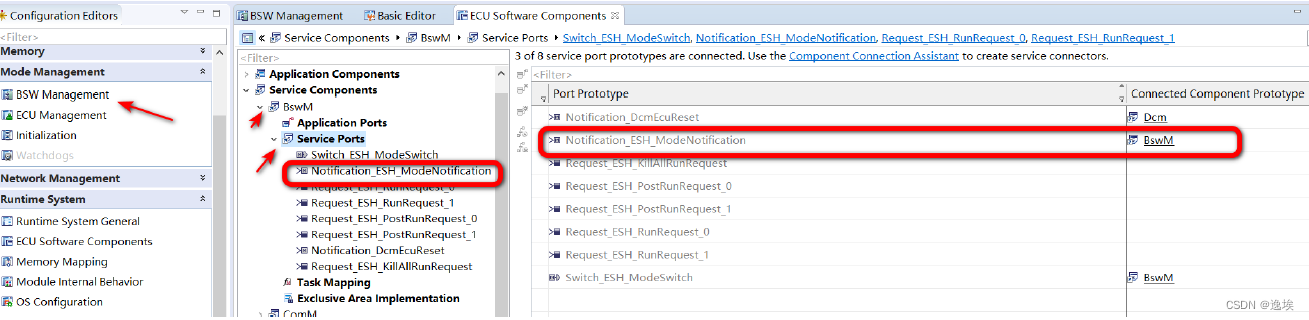
2.3.2 做好BSWM ESH_ModeNotification 的server port mapping
2.4 SWC 中mapping DcmEcuReset port
后续SWC_Diag runnable 操作和触发是模式进入决定还是其他由开发者决定。
三、code
3.1 BswM
3.1.1判定从Dcm传过来的复位模式设定请求
BSWM_LOCAL FUNC(BswM_HandleType, BSWM_CODE) BswM_Rule_BswMRule_DcmEcuResetHard(BswM_PCPartitionConfigIdxOfPartitionIdentifiersType partitionIdx)
{
BswM_HandleType retVal = BSWM_NO_ACTIONLIST(partitionIdx);
/* Evaluate logical expression LE_BswMRule_DcmEcuResetHard. */
if(BswM_Mode_Notification_DcmEcuReset_DcmEcuReset == RTE_MODE_DcmEcuReset_HARD)
{
if( BswM_GetRuleStates(BSWM_ID_RULE_BswMRule_DcmEcuResetHard, partitionIdx) != BSWM_TRUE ) /* COV_BSWM_TRIGGEREDRULEEXECUTION */
{
BswM_UpdateRuleStates(BSWM_ID_RULE_BswMRule_DcmEcuResetHard, BSWM_TRUE, partitionIdx);
/* Return triggered action list BswM_ActionList_AL_DcmEcuResetHardActions. */
retVal = BSWM_ID_AL_AL_DcmEcuResetHardActions;
}
}
else
{
BswM_UpdateRuleStates(BSWM_ID_RULE_BswMRule_DcmEcuResetHard, BSWM_FALSE, partitionIdx);
/* No false action list configured. */
}
BSWM_DUMMY_STATEMENT(partitionIdx); /* PRQA S 1338, 2983, 3112 */ /* MD_MSR_DummyStmt */
return retVal;
}
3.1.2 执行设置下电模式和操作
BSWM_LOCAL FUNC(Std_ReturnType, BSWM_CODE) BswM_ActionList_AL_DcmEcuResetHardActions(BswM_PCPartitionConfigIdxOfPartitionIdentifiersType partitionIdx)
{
/*lint -save -e534 *//* PRQA S 3109, 3200 1 */ /* MD_MSR_14.3, MD_BSWM_3200 */
Dem_Shutdown();
/*lint -restore */
BswM_UpdateTimer(partitionIdx, BSWM_TMR_ESH_NvM_WriteAllTimer, 6000u);
/*lint -save -e534 *//* PRQA S 3109, 3200 1 */ /* MD_MSR_14.3, MD_BSWM_3200 */
NvM_WriteAll();
/*lint -restore */
(void)EcuM_SelectShutdownTarget(ECUM_STATE_RESET, EcuMConf_EcuMResetMode_ECUM_RESET_IO);
BSWM_DUMMY_STATEMENT(partitionIdx); /* PRQA S 1338, 2983, 3112 */ /* MD_MSR_DummyStmt */
return E_OK;
}/* PRQA S 6010, 6030, 6050 */ /* MD_MSR_STPTH, MD_MSR_STCYC, MD_MSR_STCAL */
3.2 Dcm
调用0x11服务触发。
/*! Service 0x11 sub-service properties table */
CONST(Dcm_CfgSvc11SubFuncInfoType, DCM_CONST) Dcm_CfgSvc11SubFuncInfo[4]=
{
{ Dcm_Service11_01Processor} /* SF: 0x01 */
,{ Dcm_Service11_03Processor} /* SF: 0x03 */
,{ Dcm_Service11_04Processor} /* SF: 0x04 */
,{ Dcm_Service11_05Processor} /* SF: 0x05 */
};
3.3 Rte
数据传递:Dcm – > BswM,Dcm --> SWC_diag, BswM – >EcuM
FUNC(Dcm_EcuResetType, RTE_CODE) Rte_Mode_BswM_Notification_DcmEcuReset_DcmEcuReset(void) /* PRQA S 3408 */ /* MD_Rte_3408 */
{
Dcm_EcuResetType curMode;
if (Rte_AckFlags.Rte_ModeSwitchAck_Dcm_DcmEcuReset_DcmEcuReset_Ack == 0U)
{
curMode = RTE_TRANSITION_BswM_DcmEcuReset;
}
else
{
curMode = Rte_ModeMachine_Dcm_DcmEcuReset_DcmEcuReset;
}
return curMode;
}
FUNC(Std_ReturnType, RTE_CODE) Rte_Switch_Dcm_DcmEcuReset_DcmEcuReset(Dcm_EcuResetType nextMode) /* PRQA S 1505 */ /* MD_MSR_Rule8.7 */
{
Std_ReturnType ret = RTE_E_OK; /* PRQA S 2981 */ /* MD_MSR_RetVal */
uint8 internalIndexNextMode = Rte_GetInternalModeIndex_Dcm_DcmEcuReset(nextMode);
uint8 internalIndexCurrentMode;
Dcm_EcuResetType currentMode;
SuspendOSInterrupts();
currentMode = Rte_ModeMachine_Dcm_DcmEcuReset_DcmEcuReset;
internalIndexCurrentMode = Rte_GetInternalModeIndex_Dcm_DcmEcuReset(currentMode);
if (internalIndexNextMode >= 7U)
{
ResumeOSInterrupts();
Rte_CallDetReportError(RTE_SWITCH_SERVICE_ID, RTE_E_DET_MODEARGUMENT);
ret = RTE_E_LIMIT;
}
else if (Rte_AckFlags.Rte_ModeSwitchAck_Dcm_DcmEcuReset_DcmEcuReset_Ack == 0U)
{
ret = RTE_E_LIMIT;
ResumeOSInterrupts();
}
else if (internalIndexCurrentMode >= 7U)
{
ResumeOSInterrupts();
Rte_CallDetReportError(RTE_SWITCH_SERVICE_ID, RTE_E_DET_MODESTATE);
ret = RTE_E_LIMIT;
}
else
{
Rte_EventMaskType ModeSwitchEventMask;
ModeSwitchEventMask = Rte_GetModeEntryEventMask_Dcm_DcmEcuReset_DcmEcuReset(internalIndexNextMode); /* PRQA S 2986 */ /* MD_Rte_2986 */
if (ModeSwitchEventMask != (Rte_EventMaskType)0)
{
ret = Rte_IocSend_Rte_M_Dcm_DcmEcuReset_DcmEcuReset(nextMode);
Rte_AckFlags.Rte_ModeSwitchAck_Dcm_DcmEcuReset_DcmEcuReset_Ack = 0U;
ResumeOSInterrupts();
(void)ActivateTask(Mode_Task); /* PRQA S 3417 */ /* MD_Rte_Os */
}
else
{
Rte_ModeMachine_Dcm_DcmEcuReset_DcmEcuReset = nextMode;
Rte_AckFlags.Rte_ModeSwitchAck_Dcm_DcmEcuReset_DcmEcuReset_Ack = 1U;
ResumeOSInterrupts();
}
}
return ret;
} /* PRQA S 6010, 6030, 6050, 6080 */ /* MD_MSR_STPTH, MD_MSR_STCYC, MD_MSR_STCAL, MD_MSR_STMIF */
FUNC(Dcm_EcuResetType, RTE_CODE) Rte_Mode_BswM_Notification_DcmEcuReset_DcmEcuReset(void) /* PRQA S 3408 */ /* MD_Rte_3408 */
{
Dcm_EcuResetType curMode;
curMode = Rte_ModeMachine_Dcm_DcmEcuReset_DcmEcuReset;
return curMode;
}
3.4 EcuM
设置下电和复位模式
FUNC(Std_ReturnType, ECUM_CODE) EcuM_SelectShutdownTarget(VAR(EcuM_StateType, AUTOMATIC) targetState,
VAR(EcuM_ModeType, AUTOMATIC) resetSleepMode)
{
/* ----- Local Variables ---------------------------------------------- */
uint8 errorId = ECUM_E_NO_ERROR;
Std_ReturnType retval;
/* ----- Development Error Checks ------------------------------------- */
/* #21 Check the current state of the EcuM. */
#if (ECUM_DEV_ERROR_DETECT == STD_ON)
if ((EcuM_GetModuleState() < ECUM_STATE_STARTUP_TWO) || (EcuM_GetModuleState() > ECUM_STATE_APP_RUN))
{
errorId = ECUM_E_MODULE_NOT_IN_RUN_STATE;
retval = E_NOT_OK;
}
else
/* #22 Check if the parameters targetState and resetSleepMode are in a valid range. */
/* if (STATE == RESET AND ResetMode in Range) OR
* STATE == SLEEP AND SleepMode in Range) OR
* STATE == OFF)
*/
#endif
if (
/* Check for a valid state parameter */
((targetState != (EcuM_StateType) ECUM_STATE_OFF) && (targetState != (EcuM_StateType) ECUM_STATE_RESET)
&& (targetState != (EcuM_StateType) ECUM_STATE_SLEEP))
#if(ECUM_RESETMODECOUNT != 0u)
||
/* Check for a valid reset mode parameter */
((targetState == (EcuM_StateType) ECUM_STATE_RESET) && (resetSleepMode >= ECUM_RESETMODECOUNT))
#endif
#if(ECUM_SLEEPMODELIST == STD_ON)
||
/* Check for a valid sleep mode parameter */
((targetState == (EcuM_StateType) ECUM_STATE_SLEEP) && (resetSleepMode >= EcuM_GetSizeOfSleepModeList()))
# if(ECUM_VALIDOFSLEEPMODELIST == STD_ON)
||
/* Check if this sleep mode is active in this variant */
(!EcuM_IsValidOfSleepModeList(resetSleepMode))
# endif
#endif
)
{
errorId = ECUM_E_STATE_PAR_OUT_OF_RANGE;
retval = E_NOT_OK;
}
else
{
/* ----- Implementation ----------------------------------------------- */
if (targetState == ECUM_STATE_OFF)
{
/* #30 Set the state of the current shutdown target. */
/* #31 In case of ECUM_STATE_OFF ignore the resetSleepMode parameter and set the current shutdown mode to 0. */
EcuM_InternalSetShutdownTargetAndMode(targetState, 0u);
}
else
{
/* #30 Set the state of the current shutdown target. */
/* #32 In case of ECUM_STATE_SLEEP / ECUM_STATE_RESET set the current shutdown mode to parameters value. */
EcuM_InternalSetShutdownTargetAndMode(targetState, resetSleepMode);
}
retval = E_OK;
}
/* ----- Development Error Report --------------------------------------- */
#if(ECUM_DEV_ERROR_REPORT == STD_ON)
if (errorId != ECUM_E_NO_ERROR)
{
EcuM_Det_ReportError(ECUM_SID_SELECT_SHUTDOWN_TARGET, errorId);
}
#else
ECUM_DUMMY_STATEMENT(errorId); /* PRQA S 1338, 2983, 3112 */ /* MD_MSR_DummyStmt */
#endif
return retval;
}
FUNC(Std_ReturnType, ECUM_CODE) EcuM_GoToSelectedShutdownTarget(void)
{
/* ----- Local Variables ---------------------------------------------- */
Std_ReturnType retVal;
# if (ECUM_SLEEPMODELIST == STD_ON)
EcuM_StateType localShutdownTarget;
uint8 localShutdownMode;
/* ----- Implementation ----------------------------------------------- */
EcuM_InternalGetShutdownTargetAndMode(&localShutdownTarget, &localShutdownMode); /* SBSW_ECUM_POINTER_TO_LOCAL_VARIABLES */
/* Check if the current shutdown target is set to Sleep, Reset or Off. */
if (localShutdownTarget == ECUM_STATE_SLEEP)
{
# if (ECUM_POLLINGOFSLEEPMODELIST == STD_ON)
/* In case of Sleep differ if the current sleepmode needs polling or not. */
if (EcuM_IsPollingOfSleepModeList(localShutdownMode))
{
/* In case the sleepmode needs polling, call the corresponding EcuM API. */
retVal = EcuM_GoPoll();
}
else
# endif
{
/* In case the sleepmode does not need polling, call the corresponding EcuM API. */
retVal = EcuM_GoHalt();
}
}
else
# endif
{
/* In case of Off / Reset, call the corresponding EcuM API. */
retVal = EcuM_GoDown( ECUM_MODULE_ID);
}
return retVal;
}
#endif
文章来源:https://blog.csdn.net/weixin_42447823/article/details/135161873
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!