2.3_3 进程互斥的硬件实现办法
2023-12-28 10:59:26
2.3_3 进程互斥的硬件实现办法
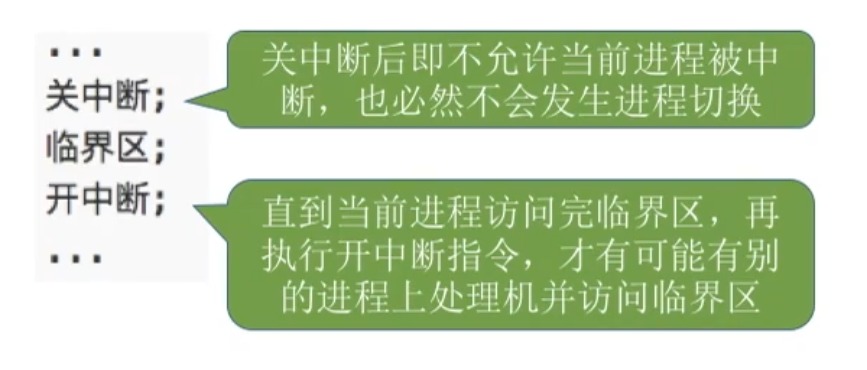
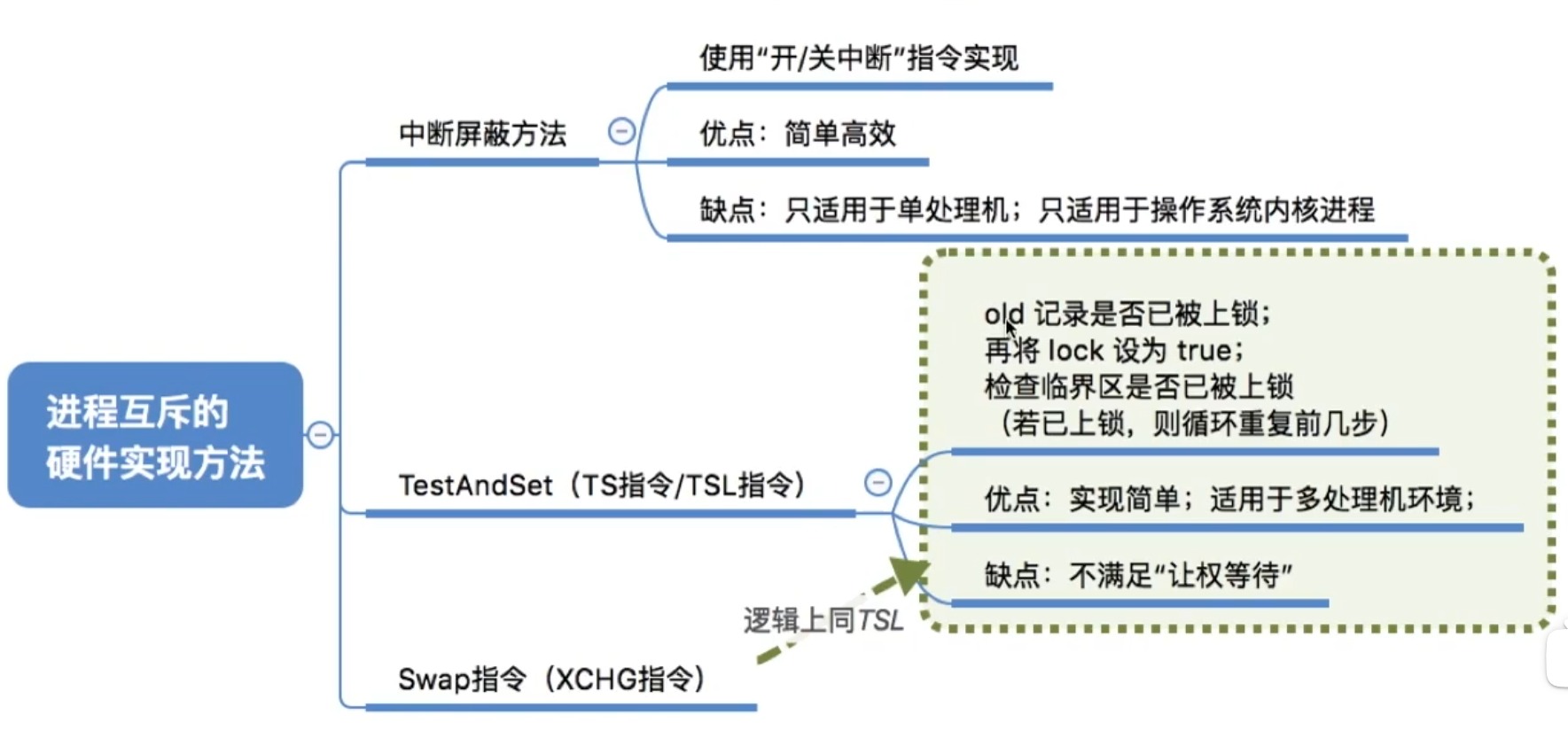
1.中断屏蔽方法
利用“开/关中断指令”实现(与原语的实现思想相同,即在某进程开始访问临界区到结束访问为止都不允许被中断,也就不能发生进程切换,因此也不可能发生两个同时访问临界区的情况)
- 优点:简单、高效
- 缺点:不适用于多处理机;只适用于操作系统内核进程,不适用于用户进程(因为开/关中断指令只能运行在内核态,这组指令如果能让用户随意使用会很危险)
2.TestAndSet指令
简称TS指令,也有地方称为 TestAndSetLock 指令,或TSL指令
TSL指令是用硬件实现的,执行的过程不允许被中断,只能一气呵成。以下是用C语言描述的逻辑:
//布尔型共享变量 lock 表示当前临界区是否被加锁
//true 表示已加锁,false 表示未加锁
bool TestAndSet (bool *lock){
bool old;
old = *lock; //old用来存放lock原来的值
*lock = true; //无论之前是否已加锁,都将lock设计为true
return old; //返回lock原来的值
}
//以下是使用 TSL 指令实现互斥的算法逻辑
while(TestAndSet(&lock)); //上锁并检查
临界区代码段...
lock= false; //"解锁"
剩余区代码段...
若刚开始lock是false,则TSL返回的old值为false,while循环条件不满足,直接跳过循环,进入临界区。若刚开始lock是true,则执行TLS后old返回的值为true,while循环条件满足,会一直循环,直到当前访问临界区的进程在退出区进行“解锁”。
相比软件实现方法,TSL指令把“上锁”和“检查”操作用硬件的方式变成了一气呵成的原子操作。
-
优点:实现简单,无需像软件实现方法那样严格检查是否会有逻辑漏洞;适用于多处理机环境
-
缺点:不满足“让权等待”原则,暂时无法进入临界区的进程会占用CPU并循环执行TSL指令,从而导致“忙等”
3.Swap指令
有的地方也叫Exchange指令,或简称XCHG指令。
Swap指令是用硬件实现的,执行的过程不允许被中断,只能一气呵成。以下是用C语言描述的逻辑:
//Swap 指令的作用是交换两个变量的值
Swap(bool *a,bool *b){
bool temp;
temp = *a;
*a = *b;
*b = temp;
}
//以下是用Swap指令实现互斥的算法逻辑
//lock 表示当前临界区是否被加锁
bool old = true;
while(old == true)
Swap(&lock,&old);
临界区代码段...
lock = false;
剩余区代码段...
逻辑上来看Swap和TSL并无太大区别,都是先记录下此时临界区是否已经被上锁(记录在old变量上),再将上锁标记lock设置为true,最后检查old,如果old为false则说明之前没有别的进程对临界区上锁,则可跳出循环,进入临界区。
优点:实现简单,无需像软件实现方法那样严格检查是否会有逻辑漏洞;适用于多处理机环境
缺点:不满足“让权等待”原则,暂时无法进入临界区的进程会占用CPU并循环执行TSL指令,从
而导致“忙等”。
知识回顾与重要考点
文章来源:https://blog.csdn.net/m0_66839257/article/details/135259330
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!