【28】Kotlin语法进阶——使用协程编写高效的并发程序
提示:此文章仅作为本人记录日常学习使用,若有存在错误或者不严谨得地方欢迎指正。
文章目录
一、Kotlin中的协程
协程是Kotlin语言中很有代表性的一种并发设计模式,用于简化异步执行的代码。协程和线程有点类似,可以简单地将它理解成一种轻量级的线程。我们前面学习的线程是属于重量级的,这是因为线程需要依靠操作系统的调度来实现不同线程之间的切换。而协程仅在编程语言的层面就能实现不同协程之间的切换,无需操作系统的介入,从而极大提高了并发编程的运行效率。
举一个具体的例子,例如我们有foo()和bar()这两个方法:
fun foo(){
a()
b()
c()
}
fun bar(){
x()
y()
z()
}
在没有开启线程的情况下,先调用foo()方法后调用bar()方法,理论上结果一定是a()、b()、c()执行完了以后,x()、y()、z()才能够得到执行。而如果在协程A中调用foo()方法,在协程B中调用bar()方法。虽然它们仍运行在同一个线程中,但在执行foo()方法时随时都有可能被挂起而去执行bar()方法;同理在执行bar()方法时也随时都有可能被挂起转而继续执行foo()方法,这就使得最终输出的结果变得不确定了。
可以看出,协程允许我们在单线程模式下模拟多线程编程的效果,代码执行时的挂起与恢复完全是由编程语言来控制的,和操作系统无关。
1.1 协程的基本用法
如果我们需要在项目中使用协程功能,需要在build.gradle.kts(:app)中添加以下依赖:
dependencies {
· · ·
implementation("org.jetbrains.kotlinx:kotlinx-coroutines-android:1.3.9") // 适用于Android项目
implementation("org.jetbrains.kotlinx:kotlinx-coroutines-core:1.3.9") // 适用于非Android项目
}
创建一个CoroutinesTest.kt文件并在其中定义一个main()函数,然后在main()函数中使用GlobalScope.launch函数:
fun main() {
GlobalScope.launch {
println("codes run in coroutine scope")
}
}
GlobalScope.launch函数可以创建一个协程的作用域,这样代码块中的代码就是在协程中运行的了。按照我们的理解,现在运行main()函数,应该会打印一句话才对。可是当你运行main()函数后却发现控制台中没有任何日志输出:
这是因为GlobalScope.launch函数每次创建的都是一个顶层协程,当应用程序运行结束时顶层协程也会跟着一起结束。刚才的日志之所以无法打印出来,正是因为代码块中的代码还没来得及运行,应用程序就结束了。为了解决这个问题,我们让程序延迟一段时间再结束就行了:
fun main() {
GlobalScope.launch {
println("codes run in coroutine scope")
}
// 让主线程休眠1s(1s后再关闭应用程序)
Thread.sleep(1000)
}
可以看到,在使用Thread.sleep(1000)让主线程休眠1s后,日志可以正常打印出来了。
可是这种写法还是存在一些问题的,如果代码块中的代码在1秒钟内不能运行结束,那么就会被强制中断:
fun main() {
GlobalScope.launch {
println("codes run in coroutine scope")
delay(1500)
println("codes run in coroutine finished")
}
Thread.sleep(1000)
}
我们在代码块中加入了一个delay()函数,并在它后面又追加了一条打印。delay()函数可以让当前协程延迟一段时间后再运行,但它和Thread.sleep()方法不同。delay()函数只会挂起当前协程,并不会影响其他协程的运行。而Thread.sleep()方法会阻塞当前的线程,这样所有运行在该线程下的协程都会被阻塞。
注意:delay()函数只能在协程的作用域或其他挂起函数中调用。
这里我们让协程挂起1.5s(打印第一行日志1.5s后再打印第二行日志),让主线程休眠1s(应用程序1s后结束)。重新运行程序,你会发现代码块中新增加的一条日志并没有打印出来,因为它还没来得及运行,应用程序就已经结束了。为了解决这个问题,我们可以借助runBlocking函数让应用程序在协程中所有代码都运行完了之后再结束:
fun main() {
runBlocking {
println("codes run in coroutine scope")
delay(1500)
println("codes run in coroutine finished")
}
}
runBlocking函数同样会创建一个协程的作用域,但它可以保证所有该协程作用域内的代码和子协程,在执行完毕之前会一直阻塞当前线程。需要注意的是runBlocking函数通常只应该在测试环境下使用,在正式环境中使用容易产生一些性能问题。重新运行程序,可以看到两条日志都能够正常打印出来了:
1.1.1协程与协程作用域
- 协程(Coroutine)是一种轻量级的并发单元,可以在其执行过程中挂起并返回到其父协程或顶层协程。协程的主要特点是它们能够被挂起并恢复,这使得它们可以用来实现并发和异步编程。
- 协程作用域(Coroutine Scope)则是一种定义协程生命周期范围的对象。每个协程都必须在某个作用域内运行,当作用域被销毁时,它内部的所有协程都会被自动取消。协程作用域可以用来管理协程的启动、取消和结构化并发。
简单来说,协程是轻量级的并发单元,而协程作用域则是定义协程生命周期范围的对象,它可以用来管理和控制协程的执行。
1.1.2 使用launch函数创建子协程
接下来我们学习一下如何使用launch函数创建多个协程:
fun main() {
runBlocking {
launch {
println("launch1")
delay(1000)
println("launch1 finished")
}
launch {
println("launch2")
delay(1000)
println("launch2 finished")
}
}
}
这里的launch函数和我们前面所使用的GlobalScope.launch函数不同。首先①launch函数必须在协程的作用域中才能调用,其次②launch函数会在当前协程的作用域下创建子协程。子协程的特点是如果外层作用域的协程结束了,该作用域下的所有子协程也会一同结束,而GlobalScope.launch函数创建的永远是顶层协程。
我们在runBlocking函数结构中调用了两次launch函数,也就相当于创建了两个子协程。重新运行程序,结果如下:
可以看到两个子协程中的日志是交替打印的,说明它们确实是像多线程一样并发运行的。然而这两个协程实际却运行在同一个线程当中,只是由编程语言来决定如何在多个协程之间进行调度。调度的过程完全不需要操作系统参与,这也就使得协程的并发效率会更高。
为了直观的体验到协程在处理并发事件时的效率,我们进行以下实验:
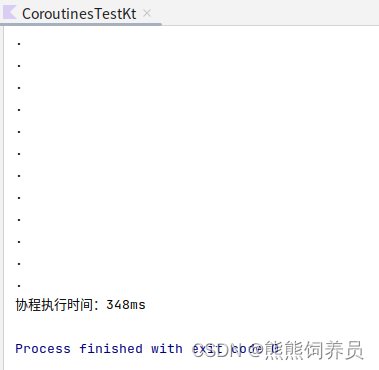
fun main() {
// 协程开始执行的时间
val start = System.currentTimeMillis()
runBlocking {
repeat(100000) {
launch {
println(".")
}
}
}
// 协程执行完毕的时间
val end = System.currentTimeMillis()
println("协程执行时间:${end - start}ms")
}
我们使用repeat()函数创建了10万个协程,并让每个协程打印一行日志,然后记录下整个操作的耗时。重新运行程序,可以看到我们仅耗时348毫秒,这足以看出协程是多么的高效。试想一下,如果我们开启的是10万个线程,程序或许早都因为内存泄露而崩溃了。
1.1.3 通过suspend关键声明挂起函数
随着launch函数中的逻辑越来越复杂,可能你需要将部分launch函数中的代码提取到一个单独的函数中。这个时候就产生了另一个问题:我们在launch函数中编写的代码是拥有协程作用域的,但是如果将其提取到一个单独的函数中就没有协程作用域了,那么我们该如何调用像delay()这样的挂起函数呢?
为此Kotlin提供了一个suspend关键字,使用suspend关键字可以将任意函数声明成挂起函数,而挂起函数之间都是可以相互调用的:
fun main() {
// 协程开始执行的时间
val start = System.currentTimeMillis()
runBlocking {
repeat(100000) {
launch {
printDot()
}
}
}
// 协程执行完毕的时间
val end = System.currentTimeMillis()
println("协程执行时间:${end - start}ms")
}
// 通过suspend关键字将printDot()声明成挂起函数
suspend fun printDot() {
println(".")
delay(1000)
}
这样printDot()函数就是一个挂起函数了,我们也就可以在printDot()函数中调用delay()函数。但suspend关键字只能将一个函数声明成挂起函数,却无法给他提供协程作用域的。例如你现在尝试在printDot()函数中调用launch函数,一定是无法调用成功的,因为launch函数要求必须在协程作用域当中才能调用。
1.1.4 coroutineScope函数
为了解决suspend关键字作用域的问题,我们可以借助coroutineScope函数来解决。由于coroutineScope函数也是一个挂起函数,因此可以在其他挂起函数中调用它。coroutineScope函数的特点是会继承外部协程的作用域并创建一个子协程,借助这个特性,我们可以给任意挂起函数提供协程作用域:
suspend fun printDot() = coroutineScope {
launch {
println(".")
delay(1000)
}
}
通过在printDot()内部使用coroutineScope函数,使得coroutineScope函数内部启动的协程(由launch创建)继承了printDot()函数的父作用域(也就是调用printDot()函数的外部作用域)。
可以看到,现在我们可以在printDot()这个挂起函数中调用launch函数了。coroutineScope函数和runBlocking函数有点类似,它可以保证其作用域内的所有代码和子协程在全部执行完之前,外部的协程会一直被挂起。例如下面的示例代码:
fun main() {
// runBlocking确保其作用域内所有代码和子协程都执行完毕前会阻塞当前线程
runBlocking {
// coroutineScope确保其作用域内所有代码和子协程都执行完毕前会阻塞当前线程
coroutineScope {
launch {
for (i in 1..10) {
println(".")
delay(1000)
}
}
}
println("coroutineScope finished")
}
println("runBlocking finished")
}
我们先使用runBlocking函数创建了一个协程作用域,然后这个主协程作用域内又调用了coroutineScope函数创建了另一个新的协程作用域,并等待该作用域内的所有子协程执行完毕。运行结果如下:
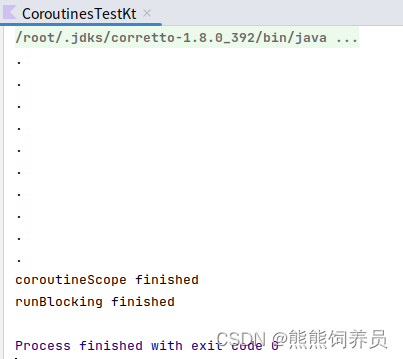
由此可见coroutineScope函数确实是将外部runBlocking协程挂起了。只有当coroutineScope作用域内所有的代码和子协程都执行完毕后,才会执行它之后的代码。需要注意,虽然coroutineScope函数和runBlocking函数很类似,但coroutineScope函数只会阻塞当前协程,既不会影响其他协程,也不会影响任何线程,因此是不会造成任何性能上的问题的。而runBlocking函数则会挂起外部线程,如果你恰好又在主线程中调用runBlocking函数的话,很可能会造成界面卡死,所以不推荐在实际项目中体验。
1.2 更多的作用域构建器
在上一小节的内容中,我们学习了GlobalScope.launch、runBlocking、launch、coroutineScope这几种作用域构建器。它们之间的调用方法还是有些许不同的:
- GlobalScope.launch{ }函数、runBlocking{ }函数可以在任意地方调用。(实际项目中不推荐使用)
- coroutineScope{ }函数可以在协程作用域或者挂起函数中调用。
- launch{ }函数只能在协程作用域中调用。
注意:
①由于runBlocking{ }函数会阻塞当前线程,因此只建议在测试环境下使用,不建议在实际项目中使用。
②而GlobalScope.launch{ }函数每次创建的都是顶层协程(当应用程序结束时顶层协程也会结束),除非明确需要创建顶层协程,否则也不建议在实际项目中使用。
这里将讲一下为什么不建议在实际项目中使用顶层协程:
不建议使用的原因是它的管理成本太高了。例如我们在某个Activity中使用协程发起了一条网络请求,由于网络请求是耗时的,当用户在服务器还没来得及响应的情况下就关闭了当前Activity,按理说此时应该取消这条网络请求或者不应该进行回调操作。因为Activity已经被用户关闭了,此时就算服务器返回了数据也没有任何意义。
然而为了取消顶层协程,不管是GlobalScope.launch{ }函数还是launch{ }函数,它们都会返回一个Job对象,我们需要调用Job对象的cancel()方法来取消协程:
val job = GlobalScope.launch {
· · ·
}
job.cancel()
如果我们每次创建的都是顶层协程,那么当Activity关闭时,我们就需要逐个调用所有已创建协程的cancel()方法,这简直是一种灾难!因此GlobalScope.launch{ }这种协程作用域构建器在实际项目中也不太常用。
1.2.1 项目中创建协程的常用方法
下面是实际项目中比较常见的写法:
fun main() {
// 创建Job对象
val job = Job()
// 通过Job对象创建CoroutineScope对象
val scope = CoroutineScope(job)
// 通过CoroutineScope对象的launch{}函数创建协程
scope.launch {
//处理具体逻辑
}
// 关闭协程
job.cancel()
}
我们先是创建了一个Job对象,然后通过这个Job对象来创建一个CoroutineScope对象。之后我们就可以通过调用这个CoroutineScope对象的launch{ }函数来创建一个协程了。现在所有调用CoroutineScope的launch{ }函数所创建协程,都会被关联在Job对象的作用域下面。现在我们只需要调用一次Job对象中的cancel()方法,就可以将同一作用域内的所有协程全部取消,从而很大程度上降低了协程管理的成本。
总而言之,CoroutineScope( )函数更适合实际项目当中使用。如果你只是在Main()函数中编写一些学习测试用的代码,还是使用runBlocking{ }函数最为方便。
1.2.2 获取协程的返回值
通过前面的学习你已经知道了调用launch{ }函数可以创建一个新的协程,但是launch{ }函数只能用于执行一段逻辑,却不能获取执行的结果,因为他的返回值永远是一个Job对象。那么如何能够创建一个协程并获取它的执行结果呢?
其实我们通过async函数就可以实现,async函数必须在协程作用域当中才能调用。async函数会创建一个新的协程并返回一个Deferred对象,如果我们想要获取async函数代码块的执行结果,只需要调用Deferred对象的await()方法即可。下面是一段示例代码:
fun main() {
runBlocking {
val result = async {
5 + 5
}.await()
println(result)
}
}
我们通过async()函数将运算结果保存了下来,然后打印到日志中。
在调用了async函数之后,代码块中的代码就会立刻开始执行。当调用await()方法时,如果async函数体中的代码还没有执行完毕,那么当前协程(即 runBlocking 函数内的协程)会被挂起,直到可以获得async函数的执行结果。我们接下来编写一段代码进行验证:
fun main() {
runBlocking {
// 开始时间
val start = System.currentTimeMillis()
// result1延时1s
val result1 = async {
delay(1000)
5 + 5
}.await()
// result2延时1s
val result2 = async {
delay(1000)
4 + 6
}.await()
println("result is : ${result1 + result2}")
// 结束时间
val end = System.currentTimeMillis()
println("一共耗时 : ${end - start}ms")
}
}
这里我们使用了两个async函数来执行任务,在每个async代码块中调用delay()方法进行1秒的延时,然后在async代码块执行完毕后都调用了await()方法。按照我们之前的学习,await()方法使得async代码块中的代码在执行完毕之前会一直阻塞当前协程。运行程序后可以看到如下打印,足以说明协程是顺序执行的,即等待result1执行完毕后再执行result2的。
但是上面这种写法效率是很低的,因为每个async块执行完后都调用了await()方法。这意味着,第一个async块中的代码在执行完毕后必须等待1秒后才去执行第二个async块。而第二个async块同样会等待1秒后才去执行主线程中的其他代码,所以总的执行时间约为2秒。其实两个async函数完全可以同时执行,从而提高运行效率。现在对上述代码进行优化:
fun main() {
runBlocking {
val start = System.currentTimeMillis()
val deferred1 = async {
delay(1000)
5 + 5
}
val deferred2 = async {
delay(1000)
4 + 6
}
// 在使用返回值的地方再调用await()方法
println("result is : ${deferred1.await() + deferred2.await()}")
val end = System.currentTimeMillis()
println("一共耗时 : ${end - start}ms")
}
}
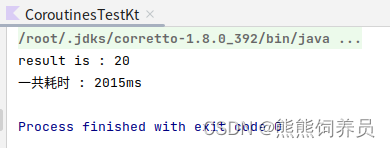
可以看到在这段代码中,我们改变了调用await()函数的时机,仅在需要用到async代码块的执行结果时才调用await()方法去获取。这样两个async函数就可以并行执行了,第二个async再也不用等待第一个async完成之后才能执行了。这次重新运行程序:
可以看到我们的代码耗时从2015ms缩短为了1015ms,运行效率显著提升。这也就说明我们两个async中的代码确实是并行执行的,并且成功将他们的结果输出到日志中了。
1.2.3 withContext函数
最后我们再来学习一个比较特殊的作用域构建器——withContext( )函数。withContext()函数也是一个挂起函数,可以将其理解成async函数的一种简化版写法。示例代码如下:
fun main() {
runBlocking {
val result = withContext(Dispatchers.Default) {
5 + 5
}
println(result)
}
}
当我们调用withContext()函数后,会立即执行代码块中的代码,同时会将外部协程(runBlocking{ })挂起。当代码块中的代码全部执行完毕后,会将最后一行的执行结果作为withContext()函数的返回值进行返回。因此基本相当于val result = async{ 5 + 5 }.await()的写法,唯一不同的是withContext()函数会强制要求我们指定一个线程参数。
你已经知道协程是一种轻量级的线程,因此很多传统编程情况下需要开启多线程执行并发任务。然而借助协程,我们只需要在一个线程中开启多个协程来执行就可以了。这并不意味着我们就永远不需要开启线程了,比如说Android中的网络请求必须要在子线程中进行,即使你开启了协程去执行网络请求,假如它是主线程当中的协程,那么程序依然会报错。这个时候我们就应该通过线程参数给协程指定一个具体运行的线程。
线程参数主要有以下3种值可以选择:Dispatchers.Default、Dispatchers.IO、Dispatchers.Main。
- Dispatchers.Default:使用一种默认低并发的线程策略,当你要执行的代码属于计算密集型任务时,开启过高的并发反而可能会影响任务的运行效率,因此就可以使用Dispatchers.Default。
- Dispatchers.IO:使用一种较高并发的线程策略,当你要执行的代码大多数时间是在阻塞和等待中,比如说要执行网络请求时,为了能够支持更高的并发数量,此时就可以使用Dispatchers.IO。
- Dispatchers.Main:表示不会开启子线程,而是在Android主线程中执行代码,但是这个值只能在Android项目中使用,纯Kotlin程序使用这种类型的线程参数会报错。
事实上除了coroutineScope{ }函数之外,其他所有的函数都是可以指定这样一个线程参数的,只不过withContext()函数是强制要求指定的,而其他函数则是可选的。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!