汽车雷达:实时SAR成像的实现
摘要:
众所周知,点云成像是目前实现汽车雷达感知最流行的方案,尤其是采用多级联实现的4D点云成像雷达,这是目前最有希望实现产品落地的技术方案之一。
今天重点分享关于汽车雷达SAR成像相关技术内容,这也证实了4D点云成像雷达并不一定就是汽车雷达成像唯一的方案,在业内目前在汽车雷达SAR成像发布最多消息的是北京行易道。

图1:SAR 和摄像头图像显示沿路停放的车辆(图源:https://ieeexplore.ieee.org/document/9104293)
减少合成孔径雷达(SAR)成像计算时间是汽车雷达实现实时性SAR成像的关键,故本文对基于反向(后向、背向)投影算法(BPA)的图像形成进行了彻底分析,并在图形处理单元 (GPU) 上单独测试和分析了各种优化。采用的措施除了减少了时间外,处理所需的数据大小也大幅减少。 综合所有措施,使用标准 GPU 在不到 30ms的时间内就能重建一幅 30 m × 30 m 的高分辨率合成孔径雷达图像,其中包含 8192 个Chirp信号。由此证明,实时实现汽车合成孔径雷达是可能的。(实时SAR的两个前提,第一是存储,第二是算力,二者缺一不可)
一、概述
对于自动驾驶,需要能够实时生成高分辨率环境地图的传感器系统。为此,雷达已被证明是有价值的。为了获得令人满意的图像质量,必须确保高方位角分辨率,这可以通过使用大的多输入多输出(MIMO)孔径来实现。[1]由于车辆上的雷达孔径大小有限,方位分辨率往往达不到要求,不过可以通过车辆运动生成合成孔径来提高方位分辨率,汽车合成孔径雷达 (SAR) 方案通常使用线性调频连续波信号 (FMCW) [2]、[3]。由于动态汽车场景中存在方位角变化大、速度不均匀和轨迹弯曲等制约因素,反向投影(BP)通常被用作一种灵活的合成孔径雷达图像形成算法。BP 算法相当于匹配滤波器,并优化了信噪比 (SNR),从而最大限度地利用的自我姿态信息,进而无需简化假设或等距采样。 [4]但是BP 算法的这些特点是以高计算复杂度为代价的,为了满足实时性,必要的妥协往往会限制信噪比和图像质量。在文献[5]中,使用了一种嵌入式简化合成孔径雷达算法,该算法以先前的目标提取为基础,并受到先前目标提取的极大限制。文献[6]中的方法必须通过调整脉冲重复频率来实现均匀采样。在文献[7]、[8]中的快速因子反向投影算法被用于汽车合成孔径雷达成像,这虽然缩短了运行时间,但无法轻松适应不断变化的速度,图像质量也有所下降。此外,由于BP非常适合并行处理,因此使用图像处理器(GPU)可以缩短计算时间[9]。
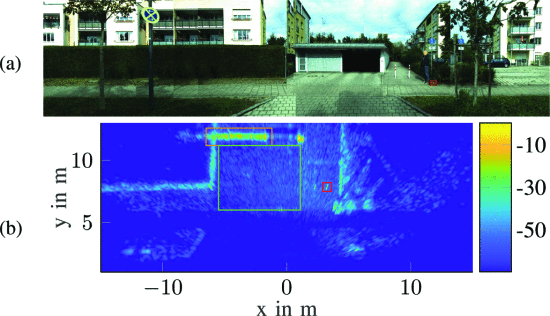
图 1:(a) 多张图
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!