dToF直方图之美_激光雷达多目标检测
2023-12-13 07:17:25
直方图提供了一种简单有效的方法来分析信号分布并识别与目标存在相对应的峰值,并且能够可视化大量数据,让测距数形结合。在车载激光雷达中,对于多目标检测,多峰算法统计等,有着区别于摄像头以及其他雷达方案的天然优势。
如下图,当中有着清晰可见的三个峰值,我们可以非常简单的寻峰算出三个距离。以前我一直以为车载激光雷达的SPAD也会有pile up难题(激光雷达中是不需要校正Pile up算法的,这点大家如果有疑问,可以后台来交流哦),后面经过某友人的点播,才知道在车载激光雷达中,寻峰算法可以简单到极致,在校正算法当中可以简单快速的输出Depth深度和三维点云,在自动驾驶,车路协同,城市规划中非常出色玩味。
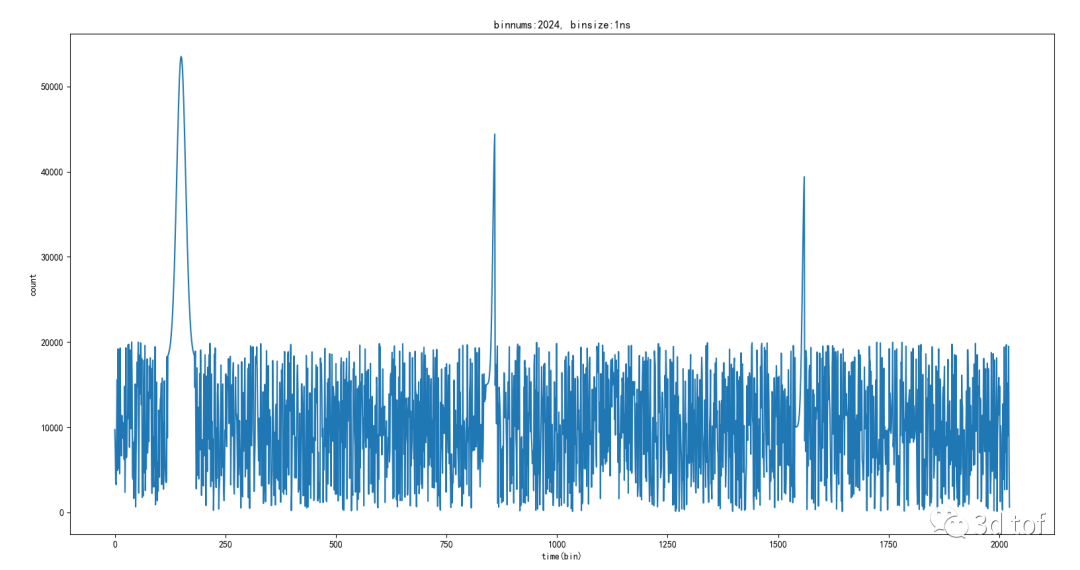
三个目标检测的寻峰算法
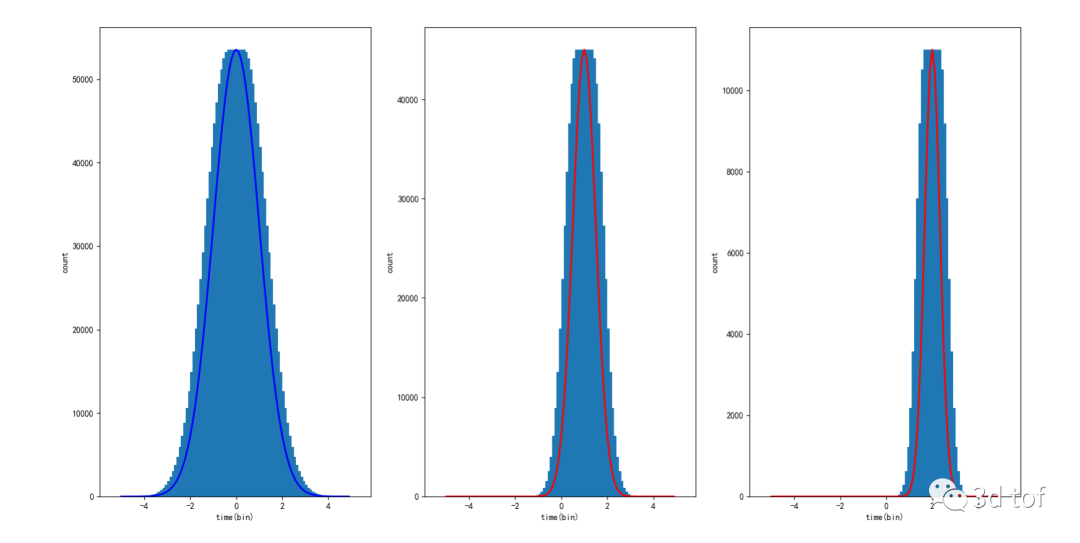
能够看到着这几个目标Signal的信噪比非常好,呈现非常Nice的高斯分布。在车载激光雷达系统中,每个目标物都会以这样的峰值出现直方图的某个位置上
文章来源:https://blog.csdn.net/linjingtu/article/details/134913711
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!