【正点原子】STM32电机应用控制学习笔记——5.BLDC直流无刷电机无感控制
上一篇文章是有感控制,就是通过位置传感器来知道下一步要通哪一项的上下桥臂。这种方式实现的六步换向就是有空控制。
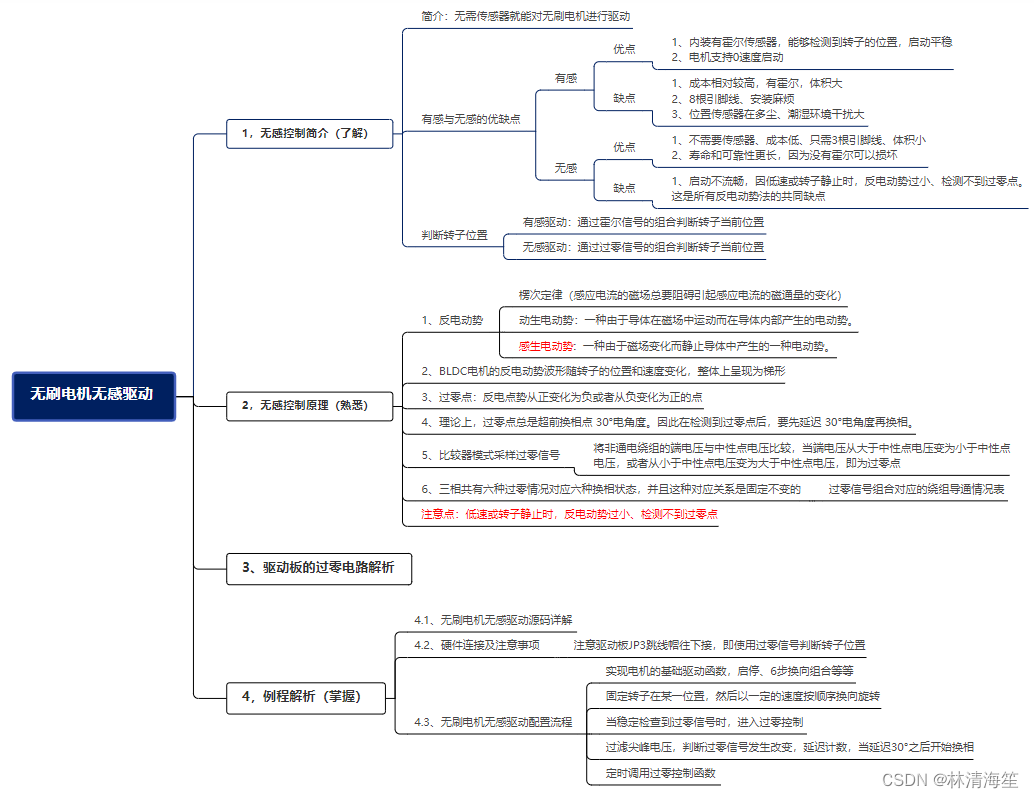
一.无感控制简介(了解)
1. 有感和无感电机
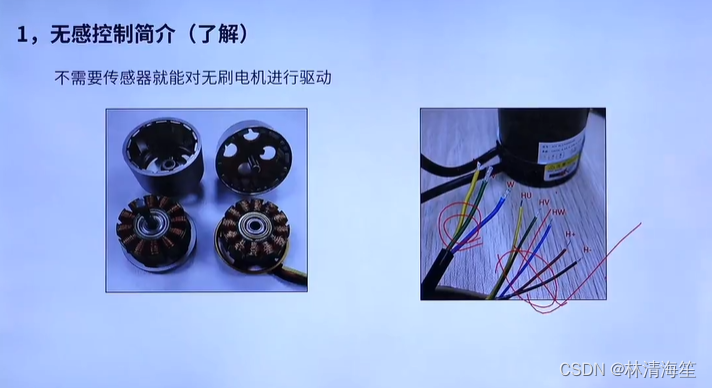
无感就是没有位置传感器也能实现对无刷电机的驱动。
所以无刷电机只有uvw三根线。那么之前有霍尔传感器的无刷电机其实也可以实现无感驱动,就是不接霍尔传感器的线即可。
无感驱动由于没有位置传感器,所以体积很小,这就是其最大的优势和区别了。
2.有感驱动和无感驱动电机优缺点
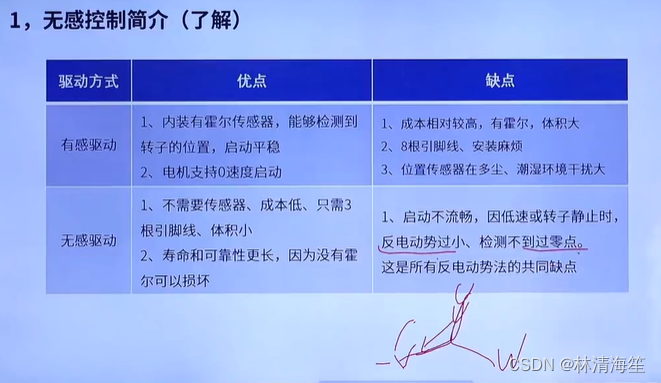
有感驱动由可以实时检测转子位置的霍尔传感器,可以实现零速度启动。也就是只要霍尔传感器一通电,就能输出0101的信号,通过三个霍尔就能知道当前转子所在的位置,就能知道下一步能给哪一相进行通电了。这就是零速度启动,非常稳定。
缺点就是有了传感器,成本也相对较高,体积大。有八根引脚线,接线安装比较麻烦。传感器也容易收到多尘潮湿环境的干扰影响。
无感驱动的成本较低,不需要传感器,接线容易,不需要额外的位置安装霍尔传感器。寿命也更长,因为没有霍尔传感器可以损坏。前面有感驱动的传感器一损坏,电机就驱动不了了。
无感电机一般通过反电动势进行驱动的,所以它的启动不流畅,因为在低速或转子静止的时候,反电动势过小,检测不到过零点,就驱动不了电机。这也是所有反电动势法的共同缺点。
那么我们可以先把转子固定到一个位置,比如uvw首先固定好u接正,v接负,然后按顺序进行通电,让转子进行旋转起来,旋转到一定速度的时候就能检测到反电动势了,接着就能通过过零点知道反电动势了,

二.无感控制原理(熟悉)
1. 楞次定律
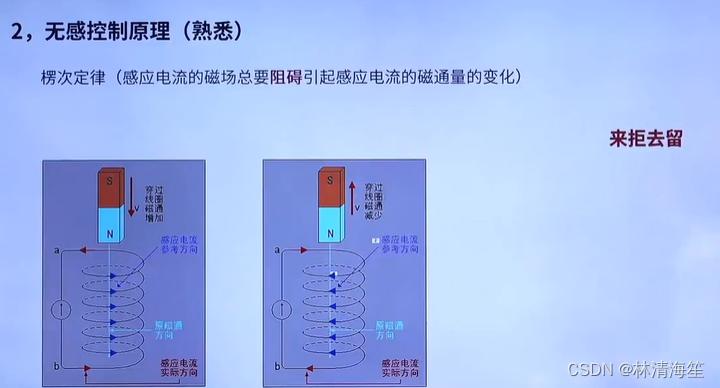
感应电流的磁场总是要阻碍引起感应电流的磁通量变化(楞次定律)
阻碍:当磁通量增加的时候,就会产生一个相反的磁通量。当磁通量减少的时候,就会产生增加的磁通量。
如图所示,当磁铁N极向下靠近线圈,线圈磁通量增加,线圈就会阻碍磁通量的增加,就会产生相反的向上的磁通量,产生感应电流,就会产生感应电动势,也就是反电动势。
总结起来就是四个字:来拒去留
感应电动势分为两种,第一种是动生电动势,导体在磁场中的运动,磁场是静止的,导体就产生运动切割磁场产生的电动势。
另一种是感生电动势,这里导体是静止的,磁场是变化的,导体产生的电动势就是感生电动势了。
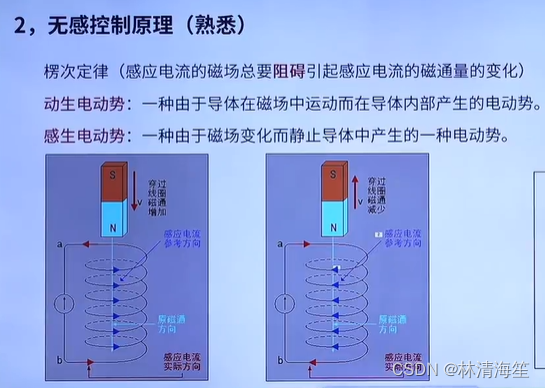
下图为无刷电机的结构图,定子就是不动的饶阻,也就是导体,而转子是运动的,所以磁场是变化的,所以无刷电机产生的是感生电动势。
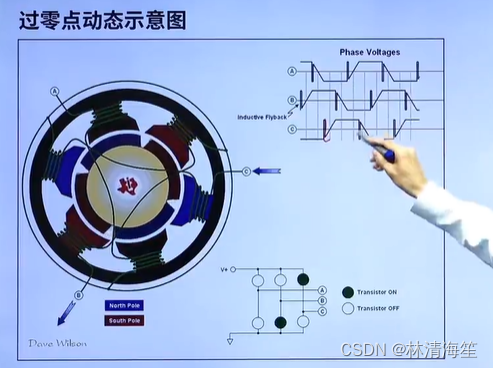
2.过零点的动态示意图
这是无刷电机,转子一直在改变转动,磁场也是在一直改变的,此时线圈导体会产生反电动势的。
上图是感应电动势的波形图,下图为abc三相上下桥导通的情况。实心就是导通,控制就是关闭。
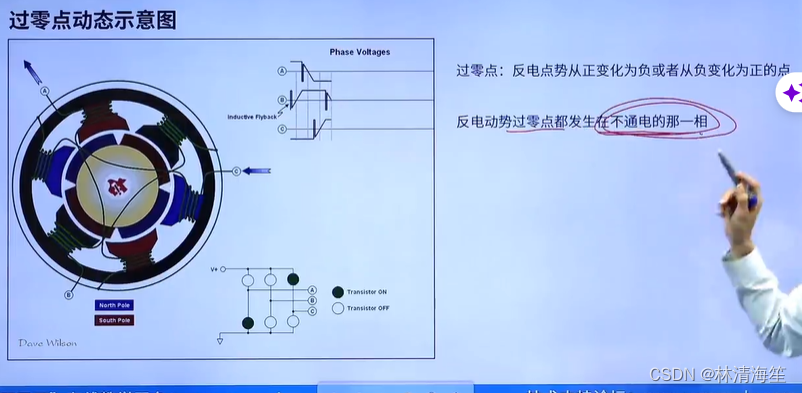
过零点就是反电动势由正变为负,或者由负变为正,产生的零点,这个点就是过零点。
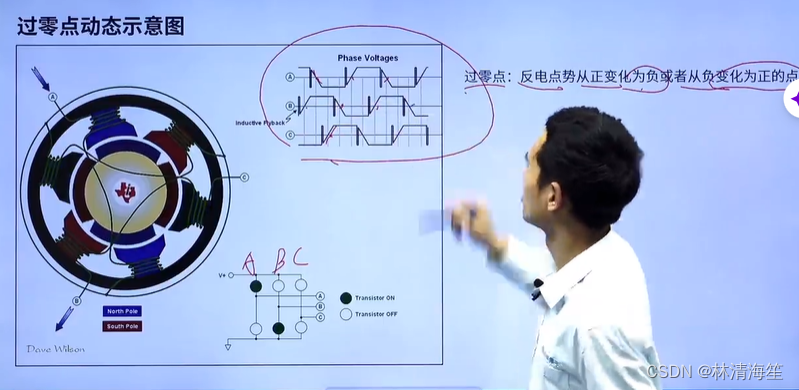
当AB相导通,过零点在C相,C相是悬空的。
规律:过零点是发生在不通电的那一相桥臂。
3.过零检测原理
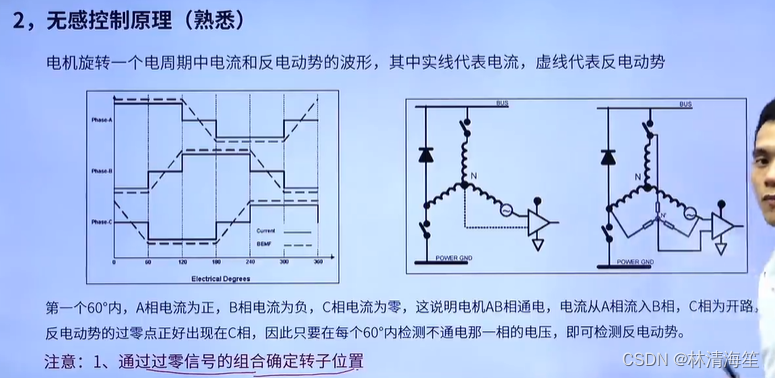
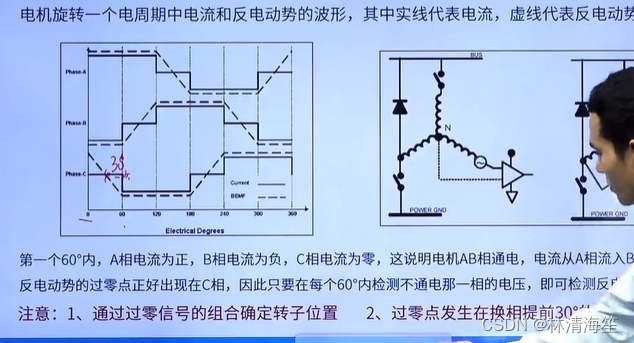
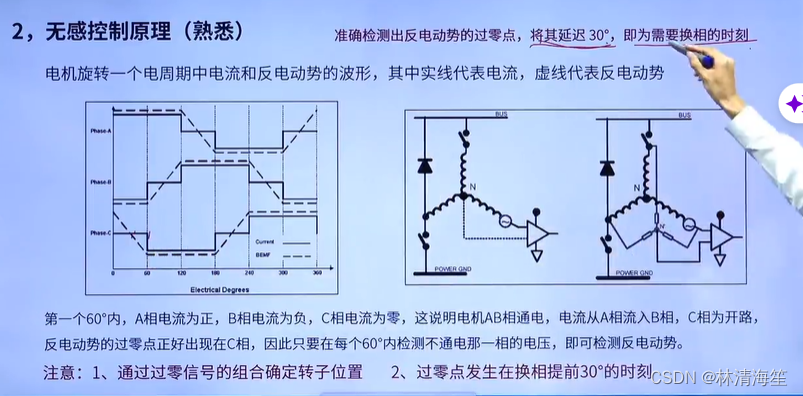
电机旋转一个电周期中电流以及反电动势的波形波形图,如下,实线表示的是电流,虚线表示的是反电动势。
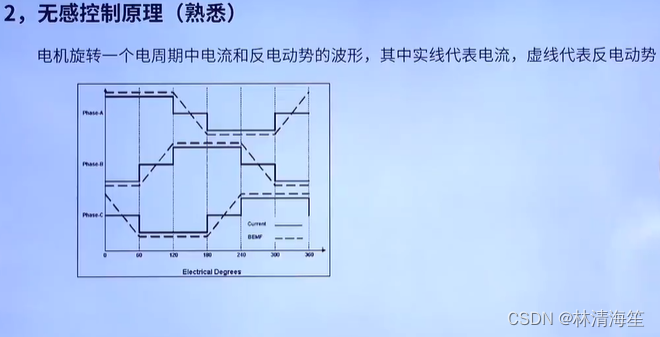
从图中可以得到的信息,以第一个60度为例,A相电流实线是接正的。B相是负。C相就是零。可以看到电流的值。这表示AB相是导通通电的,C项电流为0表示其是开路的。
虚线就是反电动势了,此时反电动势的过零点由正变为负,这就有过零点了。
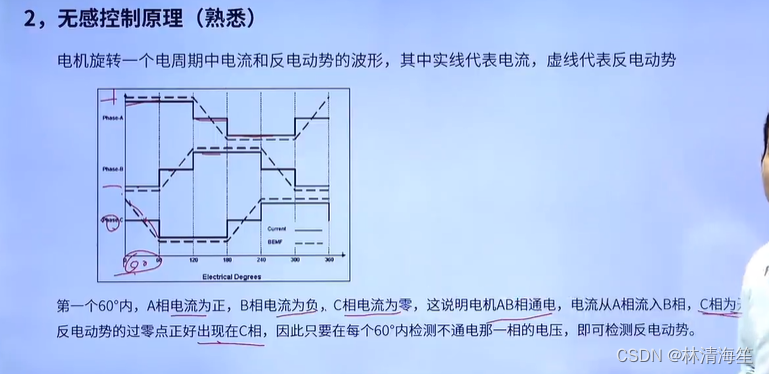
因此我们只需要检测每个60度内不通电一侧的相电压,就可以检测反电动势了。
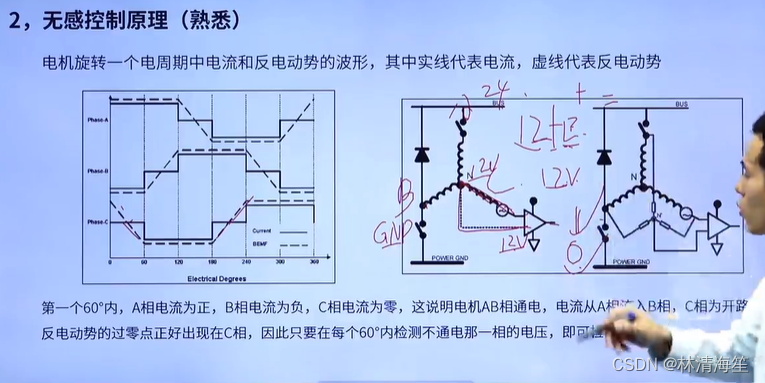
在这里我们使用一个比较器,首先假设三个线圈为ABC相,C相是悬空的一项,不导通的,所以我们把它接到比较器的一段,比较器的另一端接的是中性点,比较它的电压值。
假设A相接正,为24v,B相接地GND,中性点不考虑限流电阻的情况,理想状态就是12v。C相会产生一个反电动势的,所以它是12v加上反电动势的电压。因此C相的电压来跟12v来进行比较,当C相电压比中性点大的时候,比较器输出1,如果比中性点小的时候,就输出0。
这时候,反电动势要么是由正变负,要么是由负变正,因此只要有过零点出现,比较器的输出端就会有跳变沿,就能知道产生了过零点了。
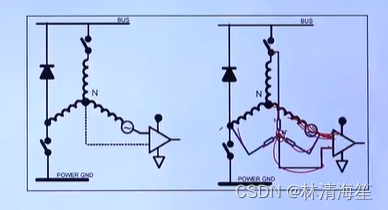
但是在实际的电机中,只引出了uvw的三根线,中性点是没有引出来的,所以一般会在驱动板子上引出这么一个电路,也就是虚拟中性点,把uvw三相都接出来,通过电阻连接到一起,这个中间的点就是虚拟中心点了,可以连接比较器的一端。
这样就可以实现比较器检测过零信号,就是当0-1或者1-0。
那么ABC三相输出0101跟霍尔传感器很相似,也是有120度的相位差,所以它们三个波形组合成的值也是六种情况,跟六步换向也是一一对应的,这个关系是固定的。只要知道过零信号的组合就能知道转子的位置。这是过零信号的第一个作用。
过零点第二个作用是,它发生在换相提前30度的时刻。也就是说检测到过零信号的变化了,不能立马进行换相,而是要延迟30度的时间之后再进行换相。
这也是过零信号和霍尔之间的区别,霍尔是一读到霍尔信号就立马进行换相,就可以导通对应的上下桥臂。但是过零信号不能进行立马换相,而是要延迟30度的时间。延迟之后再进行换相。
4.过零信号组合对应饶阻导通情况
下图为无感驱动对应的真值表。三相都是过零信号接比较器,通过比较器输出的信号就是过零信号了。
但是要注意遇到过零点不是立马导通,而是要延迟30度的电角度再进行导通。

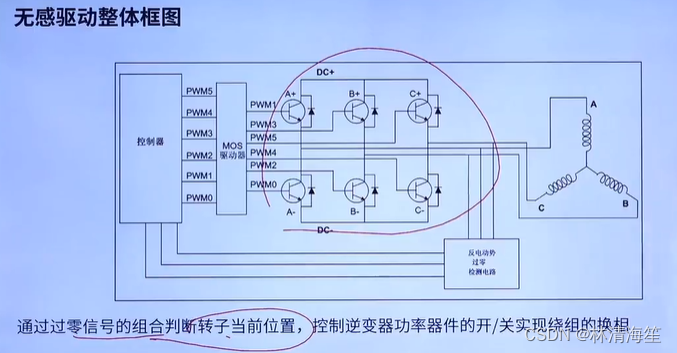
5. 无感驱动整体框图
跟有感驱动比较类似,只是将原来的霍尔传感器换成了现在反电动势的过零检测电路,也就是比较器电路,
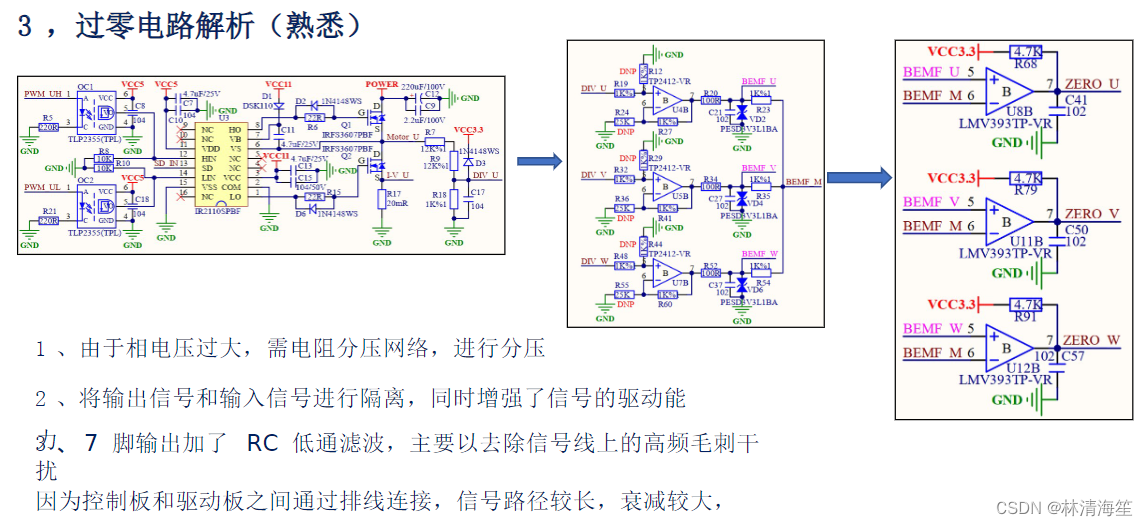
三.过零电路解析(熟悉)
相位电压经过一个电阻分压网络,来到运放,这个运放不是起放大电路的作用,所以运放的输出端电压跟输入电压相同。运放主要起到隔离的作用,还有就是增强驱动能力。接着就来到了RC低通滤波,因为反电动势受毛刺噪音干扰比较严重,所以要加一个低通滤波,之后就是uvw的三相反电动势了。然后都各自加上电阻连接到一起,这个点就是中性点。
然后就来到比较器,如果U相比中性点大则输出1,小于则输出0,然后输出过零信号。
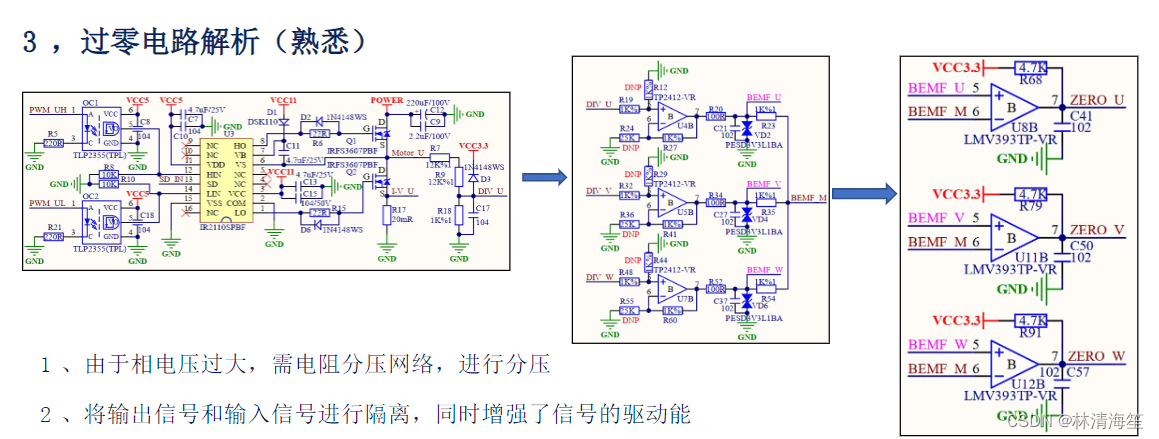
1.由于相电压过大需要电阻分压网络进行分压,
2.将输出信号和输入信号进行隔离,增强了信号驱动能力。
3.加上了RC低通滤波,去除信号线上的高频毛刺的干扰。
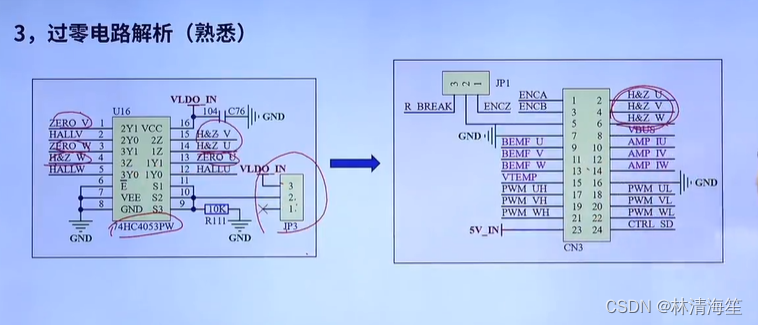
接着通过过零信号后还有一个复用芯片,通过一个跳线帽,接上面就是使用的是霍尔信号,接下面使用的是过零信号。
然后就到了端子,通过端子接到电机开发板上,同样也是这三个引脚。
四.例程解析(掌握)
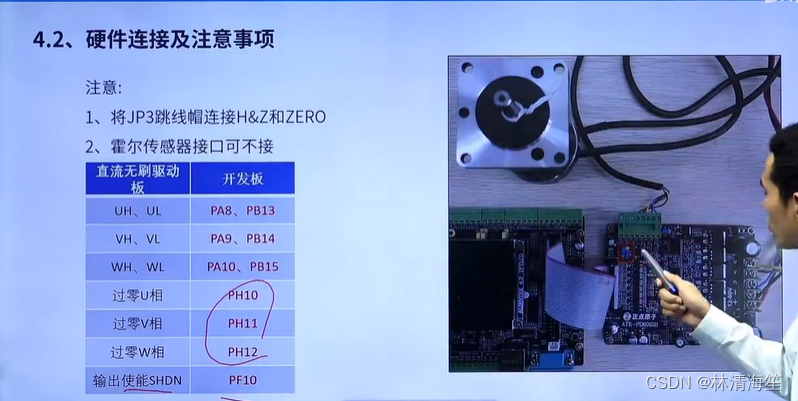
1.硬件连接以及注意事项
和有感驱动十分类似,唯一的区别就是跳线帽,这里接的就是过零信号了。还有就是不需要霍尔传感器。
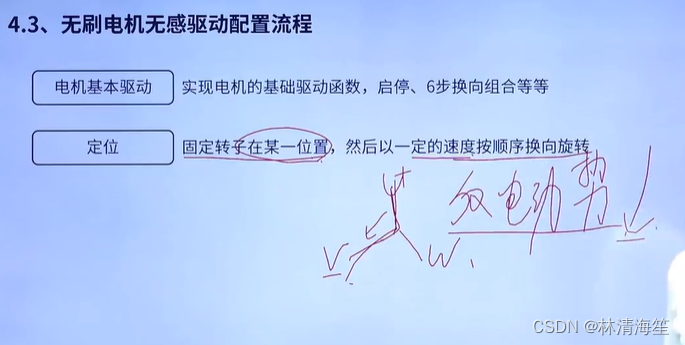
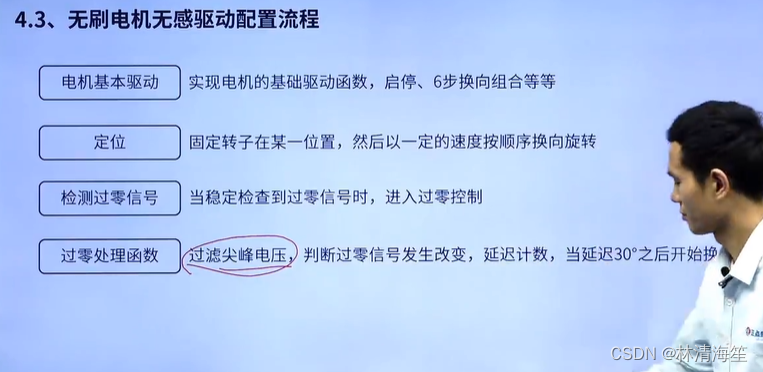
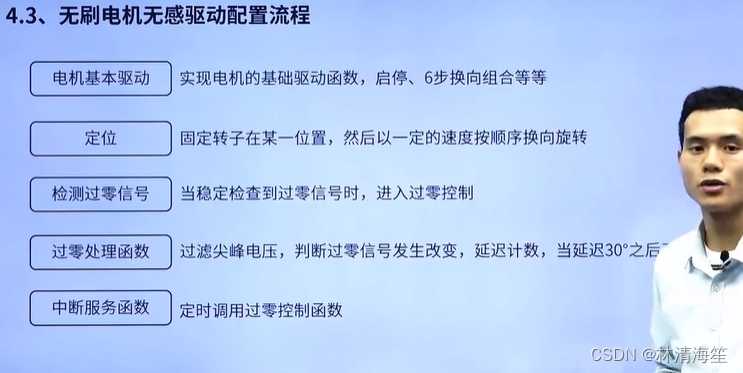
2.无感驱动配置流程
定位:无感电机都有一个缺点,就是在静止或者低速的情况下,它的反电动势是非常小的,反电动势越小,就检测不到过零点了,检测不到过零点,就检测不到转子的位置了,就实现不了旋转。
所以我们第一步就是要固定转子的一个位置,比如一开始就固定u接正v接负,接着转子就可以固定到这个位置了,那么就已知当前转子的位置了,接着按照顺序一步一步的换向。一旋转起来就有一定的速度了,之后反电动势就稳定了,稳定之后就能检测到过零信号了。
稳定之后检测过零信号,接着进入过零控制。
为什么要过滤尖峰电压?因为过零信号就是反电动势和中性点进行比较的,输出的信号就是过零信号。在理论上BLDC输出的是梯形波,但是实际的波形是存在尖峰电压的,那么这个尖峰电压对于过零信号的输出是有影响的。
因为尖峰电压,比较器或输出01的跳变,就会有过零信号,跟理论上的过零信号的点不在同一个位置,就会产生干扰。所以一定要过滤掉尖峰电压,这样程序才会正常。
最后是中断服务函数,定时调用过零控制函数。
五.课后总结(掌握)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!