【无标题】
目录
1 文档...........................................................................................................................................2
1.1 变更历史..............................................................................................................................2
2 功能说明....................................................................................................................................3
3 策略方案详细介绍......................................................................................................................3
3.1 状态简介及状态转换说明......................................................................................................3
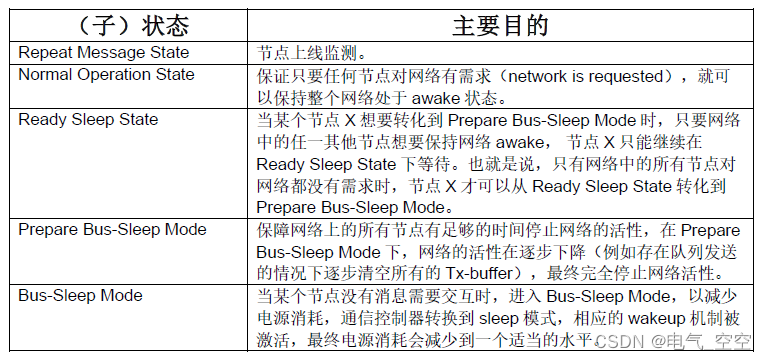
3.1.1 相关(子)状态的目的如下: ........................................................................................4
3.1.2 状态转换的说明如下:...................................................................................................5
3.2 通信机制..............................................................................................................................6
3.2.1 发送机制........................................................................................................................6
3.2.2 接收机制........................................................................................................................8
3.3 Bus Load Reduction Mechanism..........................................................................................8
3.4 Network Management PDU 结构.........................................................................................9
4 任务拆解与开发计划...................................................................................................................9
2 功能说明
目前车辆上ECU的数目越来越多,不同功能的ECU对电源有不同的要求,在点火钥匙打到OFF档(KL15停止供电)之后,有的ECU(如座椅模块)允许直接断电,有的ECU(如空调模块)需要延时断电,有的ECU(如防盗模块)需要一直带电。
需要延时断电或一直断电的节点为KL30供电的节点。KL30供电的节点在OFF档之后能进入低功耗状态,关闭大部分不需要的功能(如禁止CAN通信功能),尽可能减少电量消耗, 避免蓄电池电量消耗过多导致汽车无法启动。同时这些节点在低功耗状态下需要监控唤醒条件,如KL15信号,或CAN总线的状态等。一旦KL15开始供电,或总线上有报文(或者需要的报文,需要使用特殊的带滤波功能的收发器)等,节点应能被唤醒,进入正常工作模式。
由此可见,要实现车辆中各ECU的低功耗管理,需要实现ECU上各CAN 网络的网络管理,即对于某个CAN网络,连接到该总线上的各节点需要协同工作,遵循同样的协议以实现同步睡眠(否则进入睡眠模式的节点会被暂未睡眠节点发出的报文唤醒)。
AUTOSAR CAN Network Management(以下简称AUTOSAR CAN NM)是目前被广泛使用的一种基于协同睡眠的网络管理协议。其主要功能点如下:
1. CAN NM报文的发送(包括发送请求的方式,发送确认和发送错误处理)及接收。
2. 协同睡眠。各节点自身均满足休眠条件(Network Released),且总线上无任何网络管理报文,在等待一定时间后,所有节点协同进入睡眠状态。
3. Bus Load Reduction Mechanism。采用普通的NM报文发送方式,总线上的负载会随着网络上节点总数的增加而增加。为了降低总线上的负载,设计了一套Bus Load Reduction Mechanism。
3 策略方案详细介绍
本方案基于AUTOSAR Specification of CAN Network Management(V3.3.0, R4.0 Rev 3)。更多细节及参数说明请参考上述文档。
3.1 状态简介及状态转换说明
AUTOSAR CanNM包含3个operational mode:
1. Network Mode
其中Network Mode中包含3个子状态,如下:
? Repeat Message State
? Normal Operation State
? Ready Sleep State
2. Prepare Bus-Sleep Mode
3. Bus-Sleep Mode
3.1.1 相关(子)状态的目的如下:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!