ros2 基础学习11-参数的定义及示例
话题、服务、动作,不知道这三种通信机制大家是否已经了解清楚,本节我们再来介绍一种ROS系统中常用的数据传输方式——参数。
类似C++编程中的全局变量,可以便于在多个程序中共享某些数据,参数是ROS机器人系统中的全局字典,可以运行多个节点中共享数据。
ros2 的参数定义和基本使用和ros1 基本一致,如果了解ros1 参数的 这节 就随便看看就可以了。在java 开发中 类似 全局字典表的功能
通信模型
比如在机器视觉识别的时候,有很多参数都会影响视觉识别的效果。
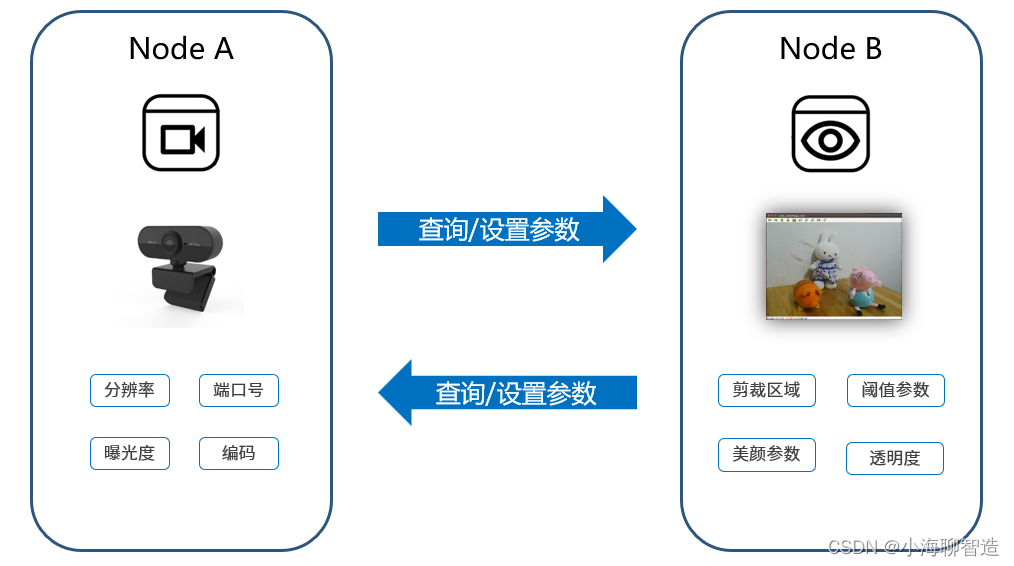
在NodeA相机驱动节点中,就需要考虑很多问题,相机连接到哪个usb端口,使用的图像分辨率是多少,曝光度和编码格式分别是什么,这些都可以通过参数设置,我们可以通过配置文件或者程序进行设置。
NodeB节点中也是一样,图像识别使用的阈值是多少,整个图像面积很大,那个部分是我们关注的核心区域,识别过程是否需要美颜等等,就像我们使用美颜相机一样,我们可以通过滑动条或者输入框设置很多参数,不同参数设置后,都会改变执行功能的一些效果。
这就是参数的作用。
全局字典
在ROS系统中,参数是以全局字典的形态存在的,什么叫字典?就像真实的字典一样,由名称和数值组成,也叫做键和值,合成键值。或者我们也可以理解为,就像编程中的参数一样,有一个参数名 ,然后跟一个等号,后边就是参数值了,在使用的时候,访问这个参数名即可。
可动态监控
在ROS2中,参数的特性非常丰富,比如某一个节点共享了一个参数,其他节点都可以访问,如果某一个节点对参数进行了修改,其他节点也有办法立刻知道,从而获取最新的数值。这在参数的高级编程中,大家都可能会用到。
案例一:小海龟例程中的参数
在小海龟的例程中,仿真器也提供了不少参数,我们一起来通过这个例程,熟悉下参数的含义和命令行的使用方法。
启动两个终端,分别运行小海龟仿真器和键盘控制节点:
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
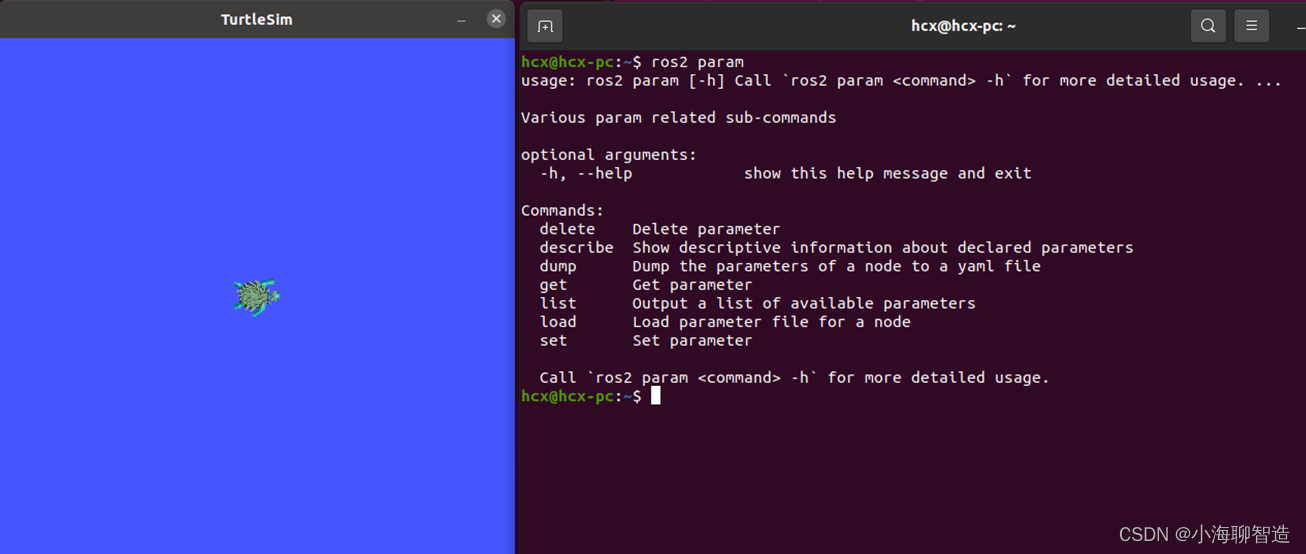
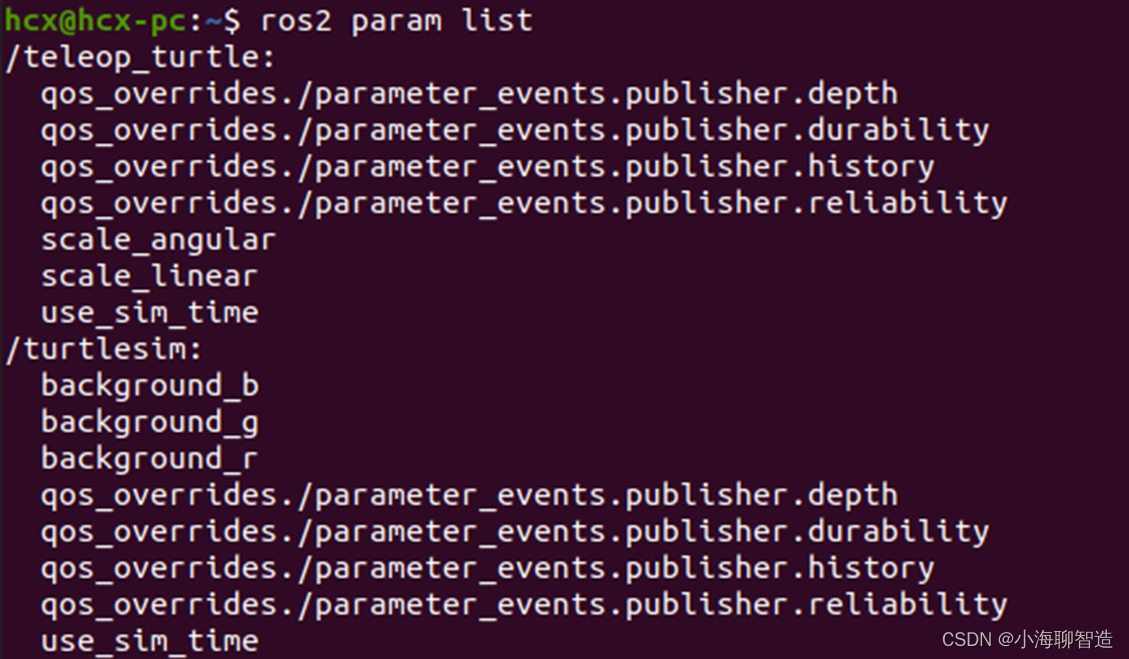
查看参数列表
当前系统中有哪些参数呢?我们可以启动一个终端,并使用如下命令查询:
ros2 param list
参数查询与修改
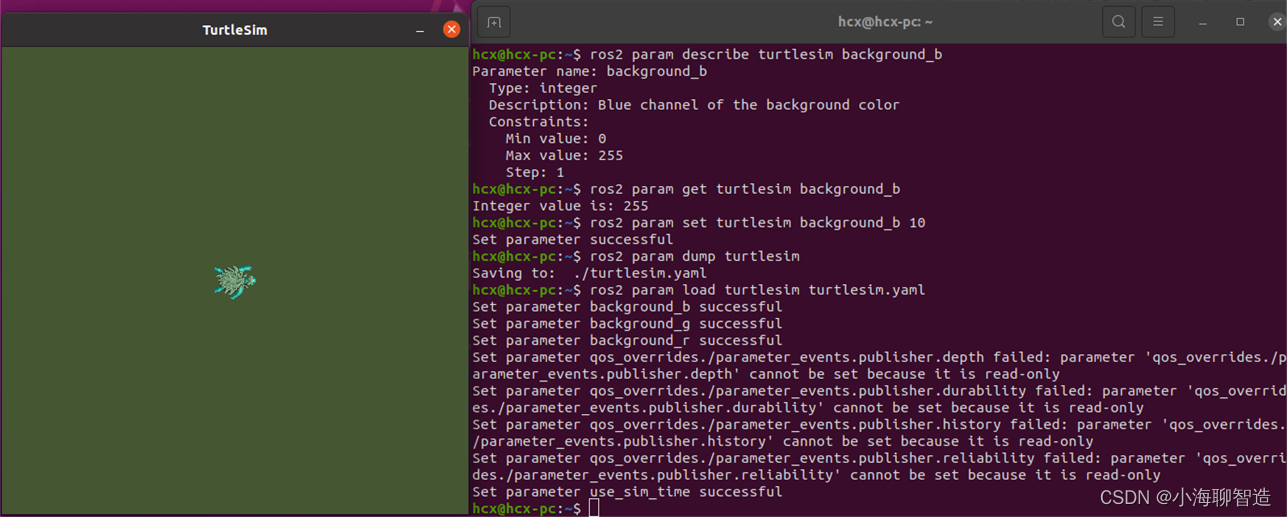
如果想要查询或者修改某个参数的值,可以在param命令后边跟get或者set子命令:
ros2 param describe turtlesim background_b # 查看某个参数的描述信息
ros2 param get turtlesim background_b # 查询某个参数的值
ros2 param set turtlesim background_b 10 # 修改某个参数的值
参数文件保存与加载
一个一个查询/修改参数太麻烦了,不如试一试参数文件,ROS中的参数文件使用yaml格式,可以在param命令后边跟dump子命令,将某个节点的参数都保存到文件中,或者通过load命令一次性加载某个参数文件中的所有内容:
ros2 param dump turtlesim >> turtlesim.yaml # 将某个节点的参数保存到参数文件中
ros2 param load turtlesim turtlesim.yaml # 一次性加载某一个文件中的所有参数
案例二:参数编程
接下来就要开始写程序了,在程序中设置参数和读取参数都比较简单,一两句函数就可以实现,我们先来体验一下这几个函数的使用方法。
运行效果
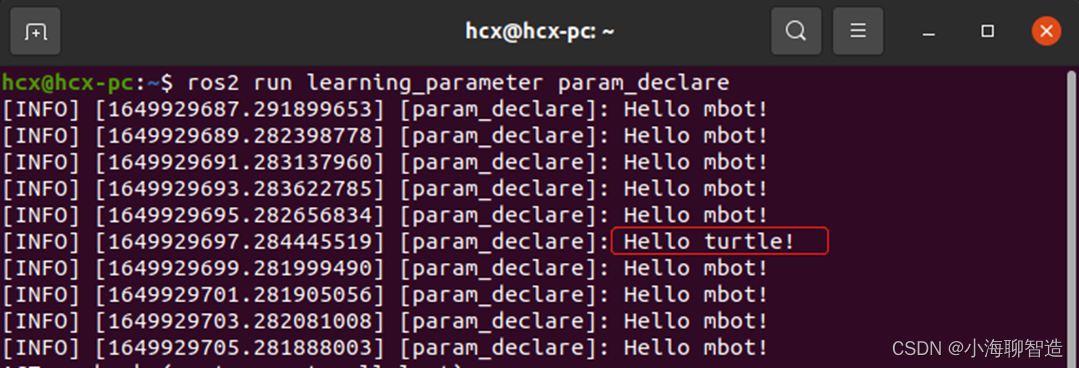
启动一个终端,先运行第一句指令,启动param_declare节点,终端中可以看到循环打印的日志信息,其中的“mbot”就是我们设置的一个参数值,参数名称是“robot_name”,通过命令行修改这个参数,看下终端中会发生什么?
ros2 run learning_parameter param_declare
ros2 param set param_declare robot_name turtle
代码解析
我们来看下在代码中,如何声明、创建、修改一个参数的值。
关键代码
learning_parameter/param_declare.py
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
class ParameterNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.timer = self.create_timer(2, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
self.declare_parameter('robot_name', 'mbot') # 创建一个参数,并设置参数的默认值
def timer_callback(self): # 创建定时器周期执行的回调函数
robot_name_param = self.get_parameter('robot_name').get_parameter_value().string_value # 从ROS2系统中读取参数的值
self.get_logger().info('Hello %s!' % robot_name_param) # 输出日志信息,打印读取到的参数值
new_name_param = rclpy.parameter.Parameter('robot_name', # 重新将参数值设置为指定值
rclpy.Parameter.Type.STRING, 'mbot')
all_new_parameters = [new_name_param]
self.set_parameters(all_new_parameters) # 将重新创建的参数列表发送给ROS2系统
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ParameterNode("param_declare") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'param_declare = learning_parameter.param_declare:main',
],
},
以上是重要的两步,如果你自己要测试验证下需要你新增功能包learning_parameter,然后将代码放在功能包下,然后编译后再运行上面的节点可测试。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!